| 丂僞儈儎 1/35 M1 ABRAMS 愴幵偺儔僕僐儞壔 | 2004.11.26 |
-
仭柍慄乮儔僕僐儞乯壔傊偺夵憿
丂侾侽悢擭傇傝偵摱怱偵栠偭偰儕儌僐儞愴幵偱梀傫偱偄偨偺偱偡偑丄傗偼傝儕儌僐儞偲偄偆偺偼傕偆堦偮偲偄偆婥偑偟偰偒傑偟偨丅壗偟傠壠偺拞傪憱傜偣傛偆偲偡傞偲愴幵偺屻傠傪晅偄偰曕偒夞傜偹偽側傝傑偣傫丅傑偨丄儕儌僐儞偺儚僀儎乕偑憱峴偺幾杺偵側傞帪傕偁傝傑偡丅偙傫側擸傒傪夝徚偡傋偔丄柍慄壔傊偺夵憿偵庢傝慻傓偙偲偵偟傑偟偨丅
丂柍慄壔偲偄偊偽丄儔僕僐儞憲庴怣婡偵僒乕儃儌乕僞乕偲偄偆偙偲偵側傞偺偩偲巚偄傑偡偑丄巆擮側偙偲偵儔僕僐儞僾儘億側傫偐堦戜傕帩偭偰偄傑偣傫丅偙傟傪婡夛偵峸擖偡傟偽椙偄偺偱偟傚偆偑丄崱夞偺愴幵偺惂屼偵昁梫側僠儍僱儖悢偼丄嵟掅偱傕係僠儍儞僱儖丄俇僠儍儞僱儖偼梸偟偄偲偙傠偱偡丅儔僕僐儞偺惢昳偱埨偔庤偵擖傞俇僠儍儞僱儖偺僾儘億偺僙僢僩偑偁傞偲偼巚偊傑偣傫丅
丂崱夞偼丄柍慄憲庴怣儌僕儏乕儖傗俹俬俠儅僀僐儞傪巊偭偰撈帺偺儔僕僐儞僔僗僥儉傪惢嶌偡傞偙偲偵偟傑偟偨丅扨弮偵崱偺係僠儍僱儖儕儌僐儞儃僢僋僗偺僗傿僢僠偺忬懺傪僔儕傾儖僨乕僞偵曄姺偟丄柍慄憲怣儌僕儏乕儖偱揹攇傪曄挷偟丄庴怣儌僕儏乕儖偱暅挷偟偰僨乕僞傪暅尦丄僗僀僢僠忬懺偵墳偠偰儌乕僞乕偺惂屼傪峴偆偲偄偆傕偺偱偡丅儌乕僞乕惂屼偵偼儌乕僞乕嬱摦梡俬俠傪巊偄傑偡丅
侾丏晹昳傪廤傔傞-
憲怣婡儃僢僋僗
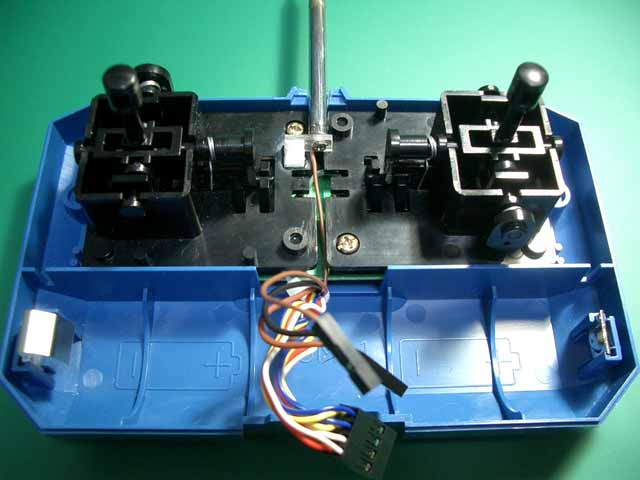
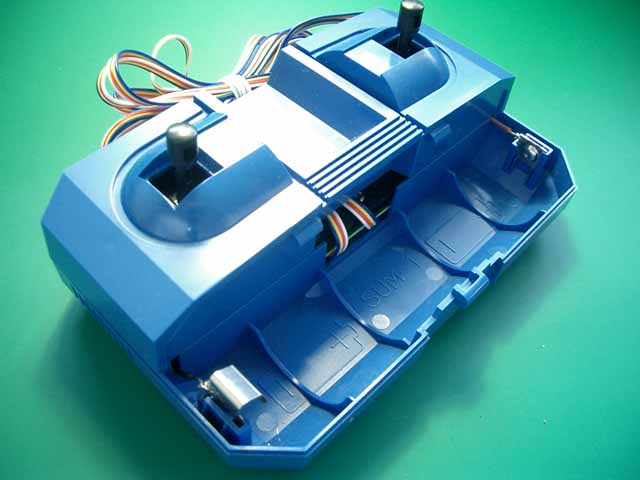 丂係僠儍儞僱儖儕儌僐儞儃僢僋僗傪棳梡偡傞偙偲偵偟傑偡丅儕儌僐儞偺僕儑僀僗僥僢傿僋偑偦偺傑傑巊偊傑偡丅扨侾揹抮偑擺傑傞僗儁乕僗偵夞楬傪慻傒崬傓偙偲偵側傝傑偡丅
丂係僠儍儞僱儖儕儌僐儞儃僢僋僗傪棳梡偡傞偙偲偵偟傑偡丅儕儌僐儞偺僕儑僀僗僥僢傿僋偑偦偺傑傑巊偊傑偡丅扨侾揹抮偑擺傑傞僗儁乕僗偵夞楬傪慻傒崬傓偙偲偵側傝傑偡丅柍慄憲庴怣儌僕儏乕儖
丂奜崙惢偺旕忢偵彫宆偺柍慄憲庴怣儌僕儏乕儖傪姅幃夛幮俬俹俬傛傝僱僢僩捠斕偵偰擖庤偟傑偟偨丅
丂丂俙俵曽幃偲俥俵曽幃偑偁傝丄俙俵曽幃傪拲暥偟偨偲偙傠丄昳愗傟偩偲偄偆偙偲偱偟偨偺偱丄彮乆崅偔側傝傑偡偑俥俵曽幃偺傕偺傪峸擖偟傑偟偨丅9.6KHz傑偱偺僔儕傾儖僨乕僞偑憲庴怣偱偒傑偡丅

|
憲怣梡 FM-RTFQ1-315 |

|
庴怣梡 FM-RRFQ1-315 | 丂
傾儞僥僫
丂丂憲怣梡傾儞僥僫偼丄俥俵儔僕僆偑夡傟偨帪偵暘夝偟偰曐懚偟偰偍偄偨儘僢僪傾儞僥僫傪棳梡偡傞偙偲偵偟傑偡丅儕儌僐儞儃僢僋僗偐傜儕儌僐儞慄偑弌偰偄傞強偵丄儕儌僐儞慄偺戙傢傝偵庢傝晅偗傞偙偲偵側傝傑偡丅
丂丂庴怣梡偼丄愴幵偵僺傾僲慄乮偁傞偄偼恓嬥乯傪庢傝晅偗偰丄傾儞僥僫偲偟傑偡丅
俹俬俠儅僀僐儞
|
丂儅僀僋儘僠僢僾僥僋僲儘僕幮(Microchip Technology Co.) 偺儚儞僠僢僾儅僀僐儞 PIC16F84A-20/P 傪俀屄峸擖偟傑偟偨丅憲怣婡梡偲愴幵梡偵偦傟偧傟堦屄傪巊偄傑偡丅 丂憲怣婡梡偱偼丄係僠儍儞僱儖儕儌僐儞僗傿僢僠偺忬懺傪僔儕傾儖僨乕僞偵曄姺偟傑偡丅愴幵梡偱偼丄庴怣偟偨僔儕傾儖僨乕僞偐傜僗傿僢僠偺忬懺傪暅尦偟丄儌乕僞乕惂屼僪儔僀僶乕俬俠乮屻弎乯傪憖嶌偟傑偡丅 |
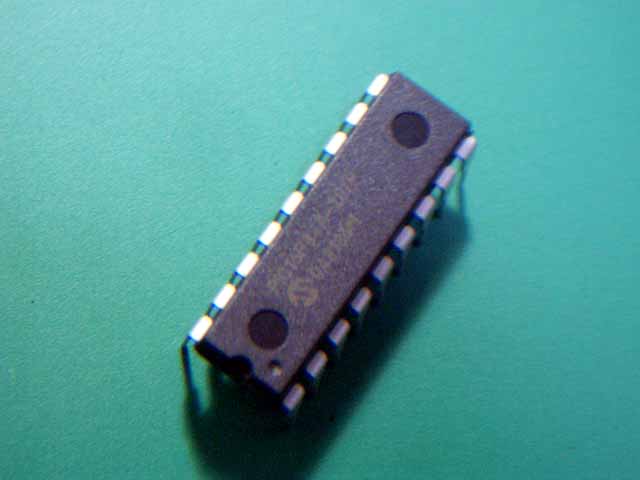 PIC16F84A-20/P |
儌乕僞乕惂屼僪儔僀僶乕俬俠
|
丂搶幣偺俢俠儌乕僞梡僼儖僽儕僢僕僪儔僀僶俬俠 TA7291P 傪係屄峸擖偟傑偟偨丅 丂偙偺僪儔僀僶偼儌乕僞乕偺惓揮丒媡揮丒僗僩僢僾丒僽儗乕僉偺惂屼傪俀價僢僩偺僨僕僞儖擖椡偺僆儞丒僆僼偱峴偊傑偡丅俹俬俠偺僨僕僞儖弌椡傪僪儔僀僶乕偺僨僕僞儖擖椡偵捈寢偟傑偡丅 丂係屄偺儌乕僞乕傪屄乆偵惂屼偡傞偨傔偵偼僪儔僀僶偑係屄昁梫偵側傝傑偡丅 |
 TA7291P |
偦偺懠
丂柍慄壔偡傞偨傔偺庡側晹昳偼埲忋偱偡偑丄偦偺懠偵揹巕夞楬傪峔惉偡傞掞峈傗僐儞僨儞僒丄揹尮丄揹尮僗傿僢僠丄俴俤俢側偳傪揔摉偵廤傔傑偡丅
俀丏惢丂嶌
-
揹尮巇條
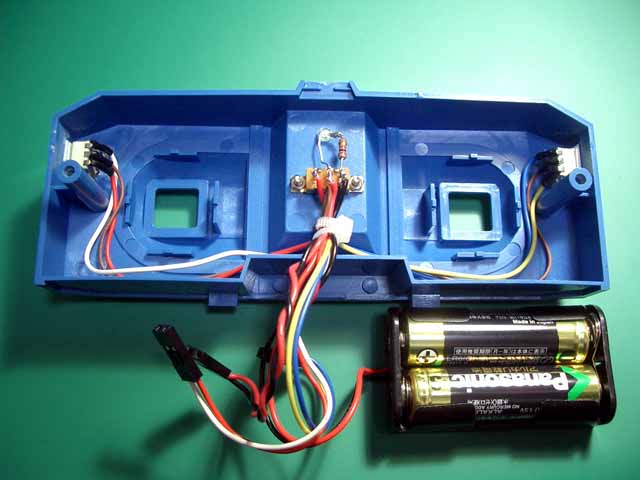
丂憲怣婡梡偵偼扨俁揹抮傪俀屄巊偄傑偡丅俹俬俠丄憲怣儌僕儏乕儖偲傕偵丄揹抮傪俀杮捈楍偵偟偨俁丏侽倁傪嫙媼偟傑偡丅憲怣儌僕儏乕儖偺掕奿揹尮揹埑偼俁丏侽倁偲側偭偰偄傑偡丅俹俬俠偼僇僞儘僌偱偼俁丏侽倁偱傕摦嶌偡傞傛偆偱偡丅
丂愴幵梡揹尮偵偼丄侾丏俀倁偺僯僢僇僪揹抮傪係屄巊偄傑偡丅俹俬俠丄庴怣儌僕儏乕儖丄儌乕僞僪儔僀僶偲傕丄係杮捈楍偺係丏俉倁傪嫙媼偟傑偡丅儌乕僞乕梡揹尮偵偼丄儌乕僞乕偺掕奿揹埑偑俁丏侽倁偱彮乆僆乕僶乕僗儁僢僋偵偼側傝傑偡偑丄僩儖僋傪壱偖偨傔偵係丏俉倁傪偦偺傑傑巊偆偙偲偵偟傑偡乮儌乕僞偐傜從偗傞傛偆側廘偄偑弌傞偐傕偟傟傑偣傫乯丅
丂偦偺屻偺惢嶌偺夁掱偱丄儌乕僞乕嬱摦夞楬偲惂屼夞楬偺揹尮傪暘棧偟傑偟偨丅奿擺僗儁乕僗偺娭學偐傜扨巐揹抮係杮傪儌乕僞乕嬱摦偵丄006P揹抮傪柍慄儌僕儏乕儖偲PIC丄儌乕僞乕僪儔僀僶偺揹尮偵巊梡偟傑偟偨丅
憲怣婡夞楬
| 丂係僠儍儞僱儖儕儌僐儞儃僢僋僗偵俁嬌愗傝懼偊僗僀僢僠傪俀屄憹愝偟丄俇僠儍儞僱儖偺惂屼偑壜擻側傛偆偵偟傑偟偨丅 丂憲怣婡慡懱偺夞楬恾偼師偺偲偍傝偱偡丅 慡夞楬恾丗transmiter |
|


| 丂儕儌僐儞儃僢僋僗偐傜愴幵偺儌乕僞乕偵愙懕偟偰偄偨攝慄傪俹俬俠偺擖椡億乕僩偵愙懕偟傑偡丅侾僠儍儞僱儖摉偨傝俀億乕僩傪巊梡偟傑偡丅 丂俇僠儍儞僱儖慡晹偱偼丄擖椡億乕僩偑侾俀億乕僩昁梫偵側傝丄俹俬俠偺 RB0-RB7 偺俉億乕僩偵僠儍儞僱儖侾偐傜係傪丄RA0-RA3 偺係億乕僩偵僠儍儞僱儖俆丄俇傪妱傝晅偗傑偡丅 |
 儌乕僞乕傊偺攝慄傪俹俬俠傊曄峏 |
| 擖椡億乕僩偺怣崋儗儀儖 | |||
| 僆僼乮拞娫埵抲乯 | |||
| 僼僅儚乕僪乮慜偵搢偟偨忬懺乯 | |||
| 儕僶乕僗乮屻傠偵搢偟偨忬懺乯 | |||
丂俹俬俠偱偼丄RA0乣RA3丄RB0乣RB7傑偱偺擖椡億乕僩偺忬懺傪僔儕傾儖僨乕僞偵曄姺偟丄RA4偺弌椡億乕僩傪捠偠偰丄柍慄憲怣儌僕儏乕儖偺曄挷怣崋擖椡抂巕 (DATA IN) 偵擖椡偟傑偡丅柍慄憲怣儌僕儏乕儖偱偼丄315MHz偺僉儍儕傾傪俥俵曄挷偟傾儞僥僫傪捠偠偰揹攇敪怣偟傑偡丅
憲怣婡PIC僾儘僌儔儉丗tx.asm
憲怣婡惢嶌
|
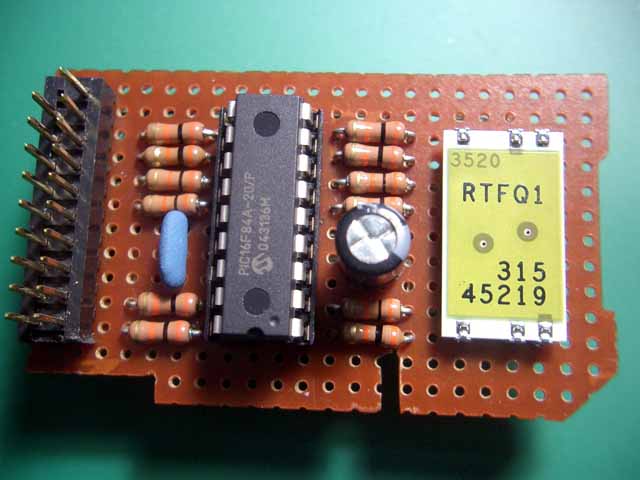
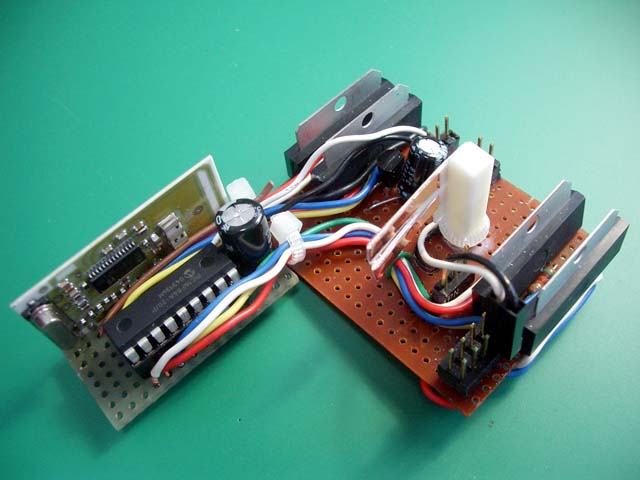
丂俹俬俠偲柍慄憲怣儌僕儏乕儖偼丄斈梡婎斦偵慻傒崬傒傑偟偨丅僗傿僢僠偐傜偺攝慄傗揹尮攝慄丄傾儞僥僫傊偺攝慄慡偰傪僐僱僋僞愙懕偲偟丄梕堈偵儃僢僋僗偑暘夝偱偒傞傛偆偵偟傑偟偨丅 |
|
 姰惉偟偨憲怣婡
姰惉偟偨憲怣婡
|
 揹尮僗傿僢僠偲俴俤俢
揹尮僗傿僢僠偲俴俤俢
|
 揹抮僇僶乕傪奜偟偨
揹抮僇僶乕傪奜偟偨
|
 僐僱僋僞傪奜偡
僐僱僋僞傪奜偡
|
 僗傿僢僠僇僶乕傪奜偟偨
僗傿僢僠僇僶乕傪奜偟偨
|
 僗傿僢僠僇僶乕偺棤懁
僗傿僢僠僇僶乕偺棤懁
|
丂柍慄憲怣儌僕儏乕儖偺揹攇傪曄挷偡傞僔儕傾儖怣崋偼丄儔僕僐儞偺僒乕儃乕儌乕僞乕偺惂屼怣崋傪傑偹偟偰傒傑偟偨丅
丂堦僠儍儞僱儖摉偨傝2.5msec挿偺僷儖僗怣崋傪巊偄丄俇僠儍儞僱儖偱15.0msec丄傾僀僪儖帪娫傪10.0msec庢偭偰慡懱偱25.0msec偺挿偝偺僼儗乕儉偲偟傑偟偨丅偙偺僼儗乕儉偑孞傝曉偟楢懕偟偰棳傟傑偡丅
丂僠儍儞僱儖枅偺僷儖僗偼丄儌乕僞乕傪媡揮偡傞帪偼丄1.0msec偺High亄1.5msec偺Low丄掆巭偼丄1.5msec偺High亄1.0msec偺Low丄惓揮偼丄2.0msec偺High亄0.5msec偺Low偲偟傑偟偨丅1.5msec亇0.5msec偺僷儖僗暆曄挷偱偡丅
庴怣婡夞楬
丂庴怣婡慡懱偺夞楬恾偼師偺偲偍傝偱偡丅
慡夞楬恾丗receiver
丂柍慄庴怣儌僕儏乕儖偐傜暅挷偝傟偨僔儕傾儖怣崋傪俹俬俠偺RA4僺儞偵擖椡偟傑偡丅俹俬俠偺僾儘僌儔儉偵偰僔儕傾儖怣崋偐傜憲怣婡懁偺僗傿僢僠偺忬懺傪暅尦偟丄RB0乣RB7偵弌椡偟傑偡丅丂RB0乣RB7偵弌椡偝傟傞怣崋儗儀儖偼丄憲怣婡懁偺俹俬俠偺RB0乣RB7偵擖椡偝傟傞傕偺偲慡偔摨偠偲側傝傑偡丅RB0乣RB7偼丄係屄偺儌乕僞乕僪儔僀僶乕偺怣崋擖椡乮IN1,IN2乯偵愙懕偝傟丄奺乆偺儌乕僞乕傪摦偐偟傑偡丅
| 僆僼乮拞娫埵抲乯 |  | |||||||||
| 僼僅儚乕僪乮慜偵搢偟偨乯 |  | |||||||||
| 儕僶乕僗乮屻傠偵搢偟偨乯 |  | |||||||||
丂儕儌僐儞偱偼丄朇搩偵巇崬傫偩僗傿僢僠偵傛偭偰朇搩偺慁夞偵暪偣偰僒僂儞僪僉僢僩傪僆儞丒僆僼偟偰偄偨偺偱偡偑丄儔僕僐儞壔偵偁偨偭偰偼丄庤尦偺僗傿僢僠偱僆儞丒僆僼弌棃傞傛偆偵僠儍儞僱儖俆偺僗傿僢僠偱惂屼偡傞偙偲偵偟傑偟偨丅俹俬俠偺RA1僺儞傪僒僂儞僪僉僢僩偺僗傿僢僠偵愙懕偟丄儌乕僞乕惓揮偺怣崋傪庴怣偟偨帪偵丄壒偑柭傞傛偆偵僾儘僌儔儉偟傑偟偨丅
丂愴幵偺憱峴忬懺偵娭學側偔儅儖僠僶僀僽儗乕僞偵傛傞帺憱揰柵偲側偭偰偄偨杮懱屻旜偺僥乕儖儔僀僩傕儔僕僐儞壔偺嵺偵曄峏偟傑偟偨丅愴幵偑僶僢僋偡傞帪偵揰摂偡傞屻戅摂偵偟傑偟偨丅俹俬俠偺RA2丄RA3僺儞偐傜捈愙LED傪嬱摦偡傞傛偆偵偟丄僠儍儞僱儖侾乮嵍憱峴儌乕僞乕乯丄僠儍儞僱儖俀乮塃憱峴儌乕僞乕乯偐傜儌乕僞乕媡揮偺怣崋傪庴怣偟偨帪偵揰摂偡傞傛偆偵僾儘僌儔儉偟傑偟偨丅
丂朇搩偵巇慻傫偩僒乕僠儔僀僩夞楬偼偦偺傑傑偱偡丅
庴怣婡PIC僾儘僌儔儉丗rx.asm
庴怣婡惢嶌
丂柍慄庴怣儌僕儏乕儖偲俹俬俠傪堦偮偺斈梡婎斦偵丄係屄偺儌乕僞乕僪儔僀僶乕偲僒僂儞僪僉僢僩傪暿偺斈梡婎斦偵慻傒崬傒傑偟偨丅僒僂儞僪僉僢僩偼丄偦偺傑傑偱偼搵嵹偱偒傞嬻娫偑柍偔丄堦搙僶儔偟偰偐傜慻傒捈偟傑偟偨丅俉怓僒僂儞僪偺撪丄昁梫側偺偼堦偮偩偗偱偡偺偱晄梫側晹昳偼庢傝嫀傝傑偟偨丅
 庴怣儌僕儏乕儖偲PIC
庴怣儌僕儏乕儖偲PIC廂擺偺娭學偱庴怣儌僕儏乕儖偼廲偵偟偰偄傞 |
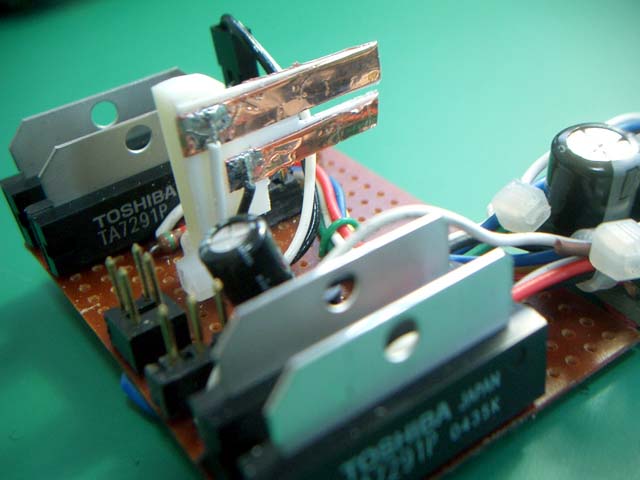 係屄偺儌乕僞乕僪儔僀僶乕
係屄偺儌乕僞乕僪儔僀僶乕婎斅拞墰偵朇搩夞揮幉偵愙偡傞愙揰僗傿僢僠偑偁傞 |
 攝慄働乕僽儖偱俀偮偺婎斅偑宷偭偰偄傞
攝慄働乕僽儖偱俀偮偺婎斅偑宷偭偰偄傞 |
 慻傒捈偟偨僒僂儞僪僉僢僩
慻傒捈偟偨僒僂儞僪僉僢僩儃儕儏乕儉傗僐儞僨儞僒偼徣棯丄僗僀僢僠梡偺僩儔儞僕僗僞傪捛壛 |
丂庴怣婡梡揹尮偼丄嵟弶偺惢嶌抜奒偱偼丄儌乕僞乕揹尮偲夞楬揹尮傪嫟梡偟偰偄傑偟偨偑丄惢嶌偟偰尒傞偲儌乕僞乕偺僲僀僘傗儌乕僞乕偺夞揮偵傛傞揹尮曄摦偐傜岆摦嶌偑寖偟偔丄偦偺屻揹尮傪暘棧偡傞偙偲偵偟傑偟偨丅
丂儌乕僞乕梡偵偼丄扨係揹抮傪係杮乮俇倁乯丄夞楬梡偵偼丄006P揹抮傪侾杮乮俋倁乯巊偆偙偲偵偟丄78L05傪捛壛偟夞楬揹尮偺埨掕壔傪恾傝傑偟偨丅
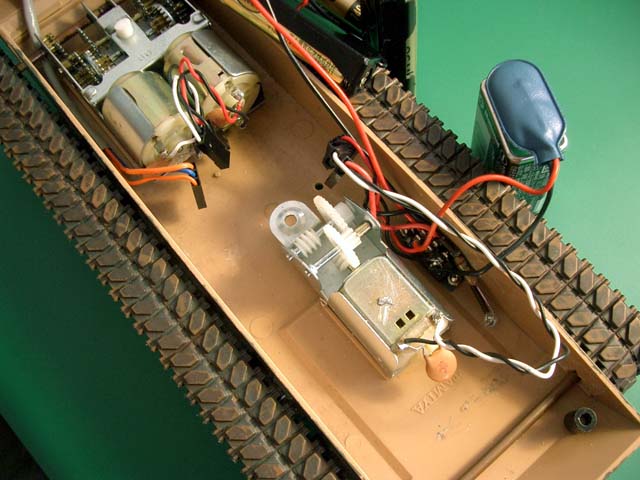
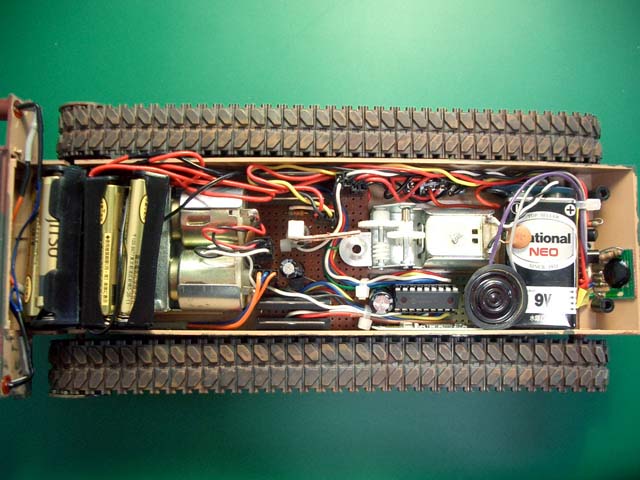
丂惢嶌姰椆偟偨愴幵撪晹偺條巕偱偡丅
 奺儌乕僞乕偵偼僐儞僨儞僒(0.1uF)偲僐僱僋僞傪愙懕
奺儌乕僞乕偵偼僐儞僨儞僒(0.1uF)偲僐僱僋僞傪愙懕
|
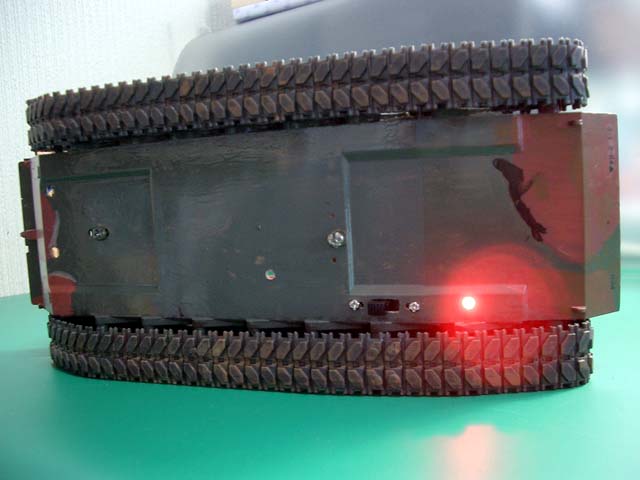 幵懱棤柺偵揹尮僗傿僢僠偲揹尮儔儞僾(LED)傪庢傝晅偗偨
幵懱棤柺偵揹尮僗傿僢僠偲揹尮儔儞僾(LED)傪庢傝晅偗偨
|
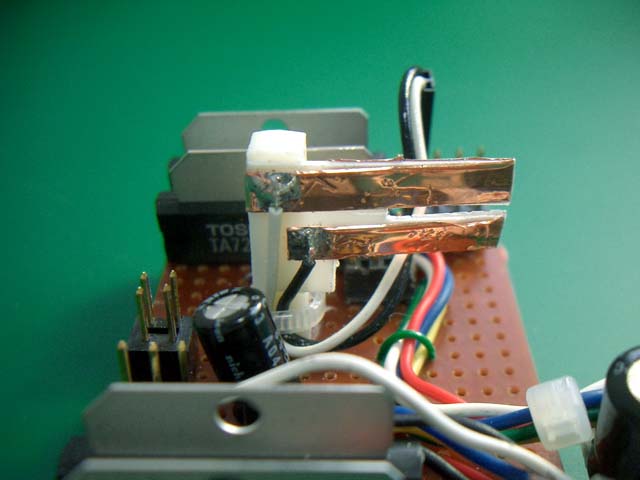 朇搩偺360搙夞揮傪幚尰偡傞偨傔偵丄朇恎忋壓摦梡儌乕僞乕傊偺攝慄偼巭傔丄摵敁偱愙揰傪嶌惉偟偨
朇搩偺360搙夞揮傪幚尰偡傞偨傔偵丄朇恎忋壓摦梡儌乕僞乕傊偺攝慄偼巭傔丄摵敁偱愙揰傪嶌惉偟偨
|
 朇搩夞揮幉偵摵敁傪姫晅偗愙揰傪嶌惉偟偨
朇搩夞揮幉偵摵敁傪姫晅偗愙揰傪嶌惉偟偨
|
 幵懱偵婎斅傗僒僂儞僪僉僢僩丄揹抮傪奿擺偟偨
幵懱偵婎斅傗僒僂儞僪僉僢僩丄揹抮傪奿擺偟偨
|
 旜晹徻嵶亅扨巐揹抮偲LED丄憱峴儌乕僞乕
旜晹徻嵶亅扨巐揹抮偲LED丄憱峴儌乕僞乕
|
 拞墰晹徻嵶亅斈梡婎斅偱嶌偭偨庴怣夞楬傪奿擺
拞墰晹徻嵶亅斈梡婎斅偱嶌偭偨庴怣夞楬傪奿擺
|
 慜晹徻嵶亅006P揹抮偲僒僂儞僪僉僢僩傪奿擺
慜晹徻嵶亅006P揹抮偲僒僂儞僪僉僢僩傪奿擺
|
-
丂崱夞偼丄尰暔崌傢偣偵傛傞僇僢僩傾儞僪僩儔僀偺惢嶌偱偟偨偺偱搑拞偱偮傑偯偔偺偼摉慠偺偙偲偱偡偑丄傗偼傝巚偄堘偄偲偄偆偐巚偄崬傒偵傛傝擸傫偱偟傑偆応柺傕偁傝傑偟偨丅揹巕岺嶌傪妝偟傓偲偄偭偰傕杮奿揑側摴嬶傪帩偪崌傢偣偰偍傝傑偣傫偺偱嬯楯傕偟傑偡丅
丂崱夞偺惢嶌偺偨傔偵俹俬俠偵弶傔偰怗傟傑偟偨偑丄偵傢偐曌嫮偱偟偨偺偱丄偮傑傜側偄偮傑偯偒傕偁傝傑偟偨丅俹俬俠偺僾儘僌儔儉偼丄儅僀僋儘僠僢僾幮偐傜採嫙偝傟傞摑崌奐敪娐嫬偺僔儈儏乕儗乕僞偱帠慜偵僨僶僢僌偱偒傑偡丅偙偺僔儈儏乕儗乕僞偼椙偔弌棃偰偄偰婘忋偱僾儘僌儔儉偺姰惉搙傪忋偘傞偙偲偼廫暘偵壜擻偱偡丅
丂俹俬俠晹暘偵娭偡傞惢嶌庤弴偱偡偑丄惢嶌偟偨斈梡婎斦忋偱偪傖傫偲俹俬俠偑摦嶌偡傞偐傑偢妋擣偑昁梫偱偡丅偦偙偱丄俹俬俠偑妋幚偵摦嶌偡傞夞楬婎斦乮僾儘僌儔儉儔僀僞乕寭梡偺俹俬俠儅僀僐儞幚尡僙僢僩乯忋偱娙扨側僾儘僌儔儉傪摦偐偟傑偡丅弌椡僺儞偵俴俤俢傪愙懕偟偰揰柵偝偣傞娙扨側僾儘僌儔儉傪彂偒崬傒摦嶌妋擣偟傑偡丅偙偺僾儘僌儔儉傪彂偒崬傫偩俹俬俠傪丄惢嶌偟偨斈梡婎斦偵憓偟崬傒丄俴俤俢傪愙懕偟偰揰柵偡傞偐妋擣偟傑偡丅偆傑偔揰柵偡傟偽斈梡婎斦偺惢嶌偼惓偟偄偙偲偵側傝傑偡丅偙偺屻丄杮棃偺憲怣婡梡僾儘僌儔儉傪彂偒崬傒丄憲怣婡偺婎斦偵憓偟捈偟傑偡丅庴怣懁傕摨條偱偡丅
丂憲怣婡丄庴怣婡偲傕廫暘偵婘忋僨僶僢僌傪峴偄丄夞楬偵慻傒崬傫偱憲怣懁偲庴怣懁偱懳岦帋尡偟傑偟偨丅憲怣婡偺僗僥傿僢僋傪憖嶌偟偰傕庴怣懁偺PIC偺RB0乣RB7偺弌椡僺儞偵怣崋偑弌傑偣傫丅婎斦忋偺攝慄偼尒捈偟偰傕栤戣偁傝傑偣傫丅
丂俹俬俠偑夡傟偨偺偐偲巚偄丄庢傝奜偟偰偐傜帋尡僾儘僌儔儉偵擖傟懼偊丄儔僀僞乕婎斦忋偱摦嶌妋擣傪嵞搙峴偄傑偟偨丅僔儕傾儖怣崋傪弌椡偡傞RA4僺儞偺摦嶌偵庒姳寽擮傪姶偠偰偄傑偟偨偺偱丄偙偙偵俴俤俢傪庢傝晅偗丄揰摂偝偣偰傒傑偟偨偑丄傑偭偨偔揰摂偟傑偣傫丅偦傟偱偼偲RA3偵曄峏偟偰傒傞偲偆傑偔揰摂偟傑偡丅僔儈儏儗乕僞忋偱偼丄偳偪傜傕堘偄偼側偔栤戣偁傝傑偣傫丅
丂偳偆偵傕栿偑傢偐傜偢丄傕偆堦搙俹俬俠偺僪僉儏儊儞僩傪撉傒曉偟偰傒傑偟偨丅RA0乣RA4丄RB0乣RB7傑偱偺侾俁杮偁傞擖弌椡僺儞偱偡偑丄奺僺儞傪弌椡僺儞偲偟偰巊梡偟偨帪丄RA4僺儞偩偗偑僆乕僾儞僪儗僀儞偵側偭偰偄傞偲僪僉儏儊儞僩偵偼彂偐傟偰偄傑偡丅RA4僺儞偼丄柍慄憲怣儌僕儏乕儖偺曄挷擖椡偵捈愙愙懕偟偰偄傑偡丅柍慄憲怣儌僕儏乕儖偺曄挷擖椡偼丄擖椡僀儞僺乕僟儞僗偼僴僀偱柍揹埑偱偡丅偙傟偱偼丄偄偔傜僾儘僌儔儉偑惓偟偔摦嶌偟偰偄偰傕RA4僺儞偵偼桳堄側怣崋揹埑偑尰傟傑偣傫丅
丂崱夞偺怣崋曽幃偱偼丄憲怣婡偺僗傿僢僠偑憖嶌偝傟偰偄側偔偰傕忢偵僷儖僗怣崋偑弌偰偄傑偡丅25msec偺撪丄怣崋侾偺忬懺偑1.5msec x 6CH=9msec偁傝傑偡丅怣崋侾偺揹埑儗儀儖偑壖偵俁V乮揹尮偼扨嶰揹抮俀杮乯偲偡傞偲丄RA4僺儞偵偼丄3x9/25=1.08 偲栺侾倁偺揹埑偑尰傟傞偼偢偱偡丅帋偟偵僨僕僞儖僥僗僞乕偱RA4僺儞偺揹埑傪應掕偟偰傒傞偲揹埑偑弌偰偄傑偣傫丅傗偼傝偱偡丅
丂偦偙偱丄RA4僺儞偺弌椡傪5K兌偺掞峈傪捠偠偰揹尮偵僾儖傾僢僾偟偰尒傑偟偨丅偡傞偲婜懸捠傝偵栺侾倁偺揹埑偑應掕偱偒傑偟偨丅
丂懳岦帋尡傪嵞奐偟偰尒傑偟偨丅偆傑偔摦嶌偟傑偡丅帠慜偵僪僉儏儊儞僩傪僉僠儞偲惛撉偟偰偄側偐偭偨偺偑尨場偱偡丅儅僀僐儞傪巊偭偨婡婍偼丄僜僼僩僂僃傾偲僴乕僪僂僃傾偑旝柇偵棈傒偁偭偰偍傝丄堦搙僩儔僽儖偵娮傞偲側偐側偐偵擄偟偄傕偺偱偡丅摉偨傝慜偵尵傢傟偰偄傞帠傪夵傔偰宱尡偟偨師戞偱偡丅