| タミヤ 1/35 M1 ABRAMS 戦車のラジコン化(機能アップ) | 2021.4.12 |
* 当ページの写真はクリックすると拡大写真や動画を表示します。
はじめに
2004年11月にラジコン化したタミヤ 1/35 M1 ABRAMS 戦車の機能アップを行いました。
機能アップの内容は、ほとんどPATTON戦車をラジコン化した時のものと同じです。サスペンションの可動、エンジンや機銃発射・主砲発射のサウンド再生、ライトの点灯などです。
これらに加えて、砲身のロック機能を追加しました。砲身のロック機能とは、車体が旋回したり前後に傾いても、砲身が一定方向に向いた状態を保つ機能のことです。
1.サスペンションの可動化
この戦車模型の車輪アーム部分は、車体と一体成型となっていますので、可動サスペンションとするには、アーム部分を作り替える必要があります。改造の様子は次のとおりです。
 |
 |
 |
| プラ棒やプラ板でアームを作成します。0.6mmのピアノ線を付けています。 |
 |
 |
 |
| 作成したアームのピアノ線部分を車体に差込ます。 | ピアノ線は折り曲げ、プラ板を接着して固定します。 |
 |
 |
| 塗装して可動サスペンションの完成です。 | 履帯を付けてサスの可動を確認しています。 |
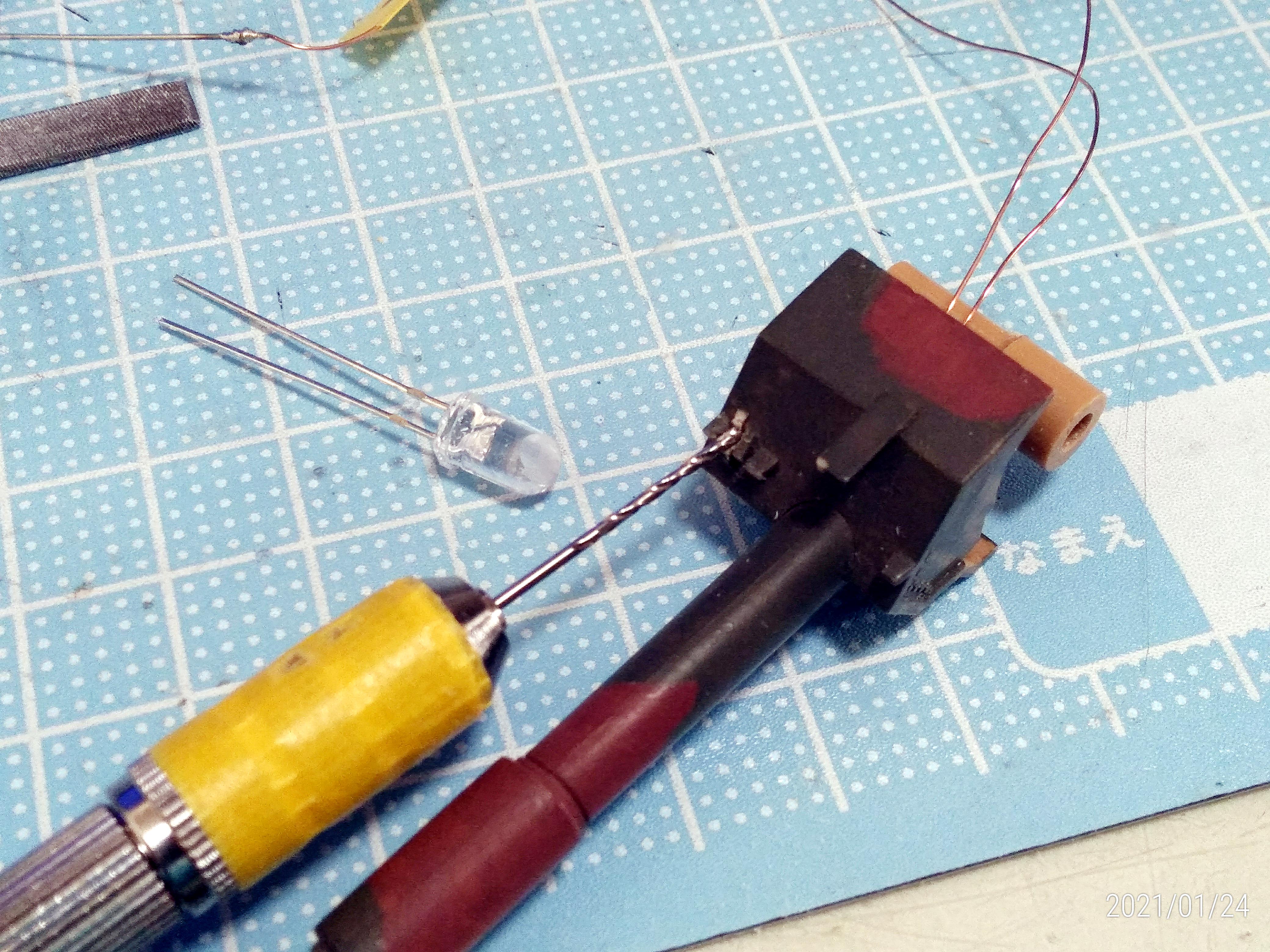
2.LEDの埋め込み
 |
 |
 |
 |
 |
| 砲身基部の機銃部分にもLEDを埋め込みます。 | フロントライトにはチップLEDを埋め込みました。 |
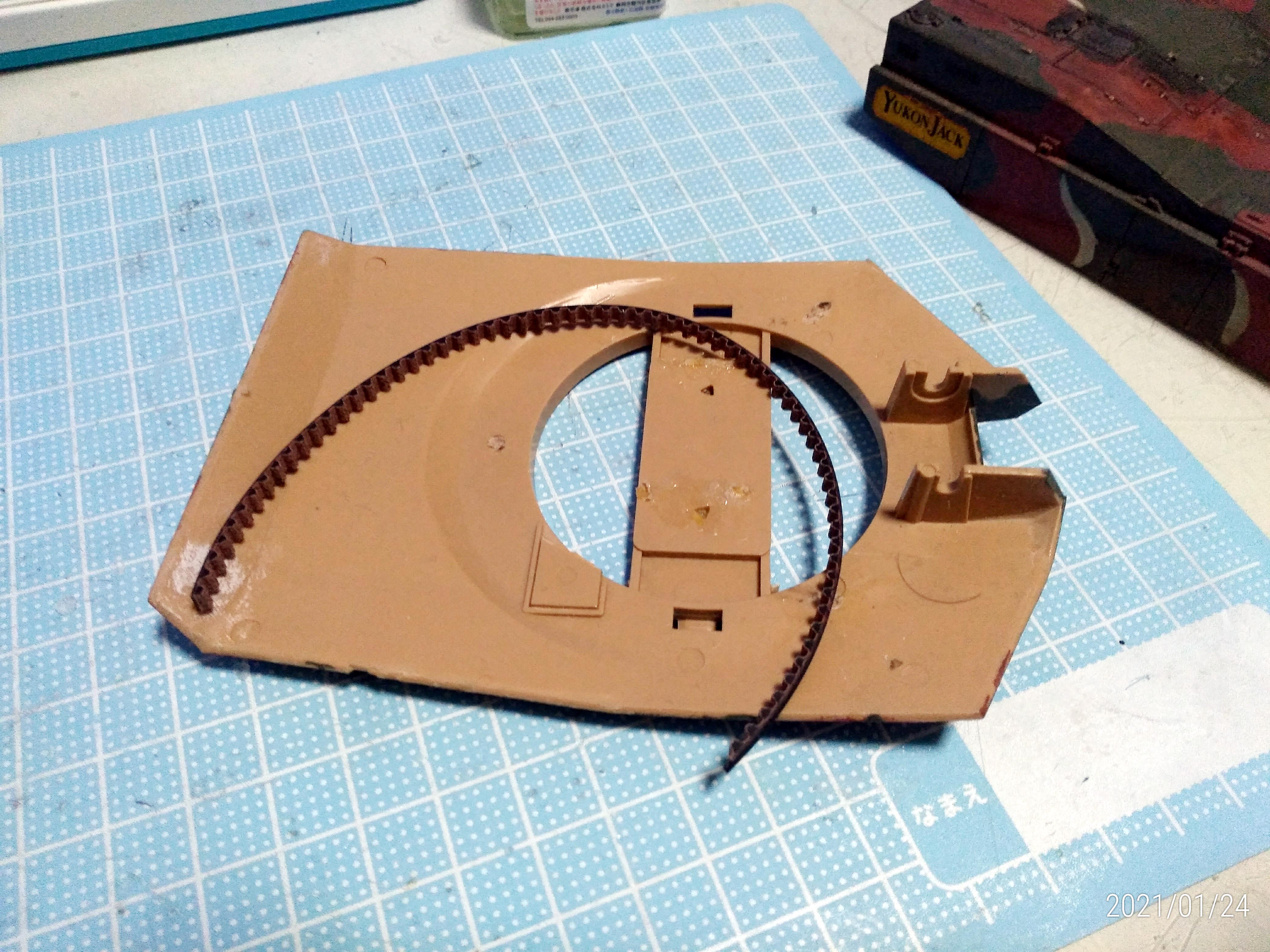
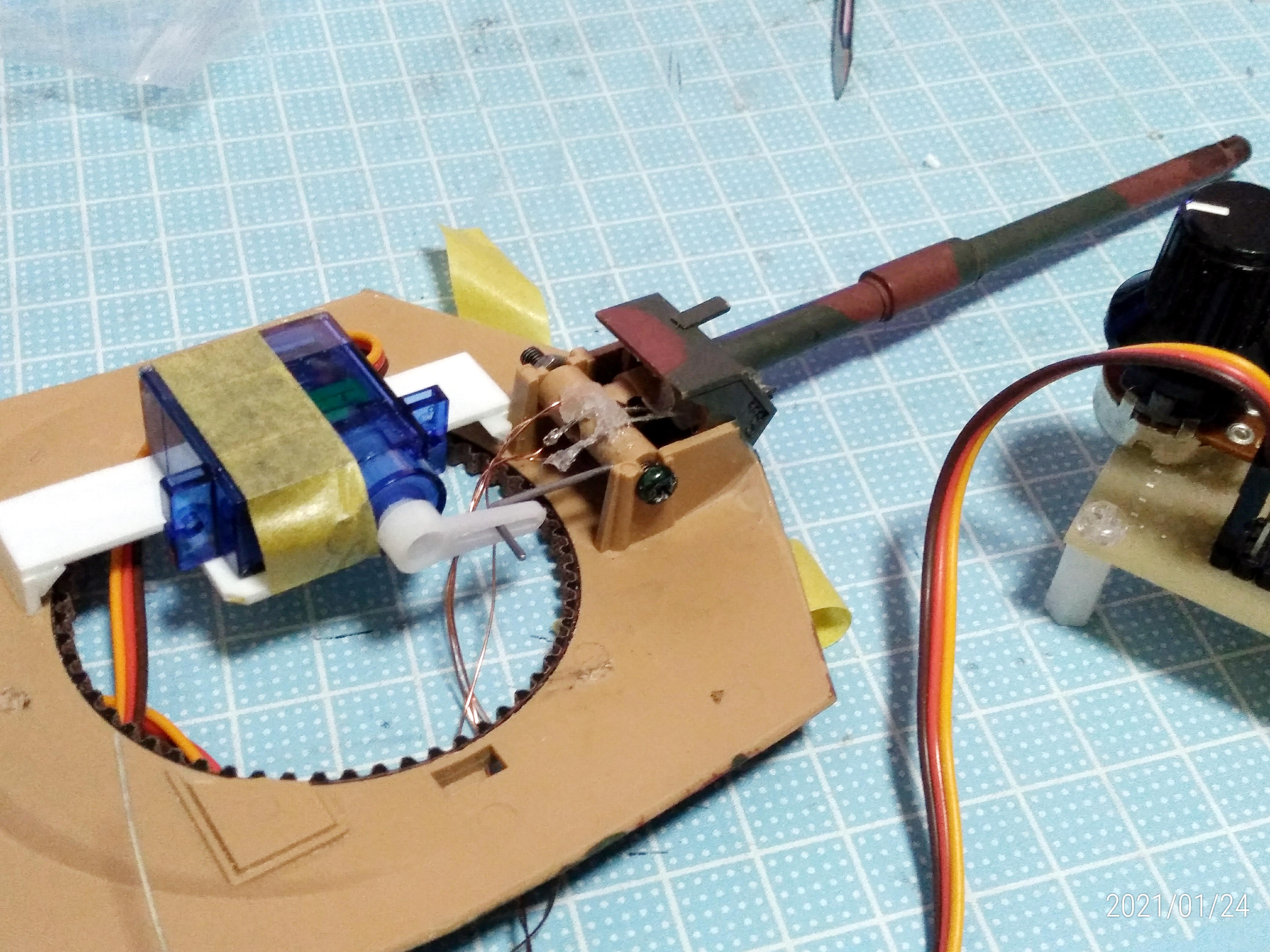
3.砲塔回転用ベルト・砲身上下用サーボモータの組込
 |
 |
 |
| 砲身上下用のサーボモーターを取り付けました。 |
4.砲身ロック機能のテスト
砲身ロック機能の簡単なテストプログラムを作って機能確認を行ってみました。その時の様子が次の動画です。
 |
砲身ロックの仕組みはこうです。砲塔内に設置したジャイロセンサーで、砲塔を含む車体全体の旋回角や前後の傾斜角を検出します。そして検出した角度を打ち消す方向に砲塔を回転したり砲身を上下させます。
テストの様子です。車体をゆっくり旋回させるとゆっくりと砲塔が逆方向に回転し元の方向に戻ります。素早く動かすと少し遅れるような感じで素早く戻っていきます。車体を前傾すると砲身は上向きに、後傾すると下向きに動きます。砲身の向いていた方向や俯角を保とうとしているのが判るかと思います。
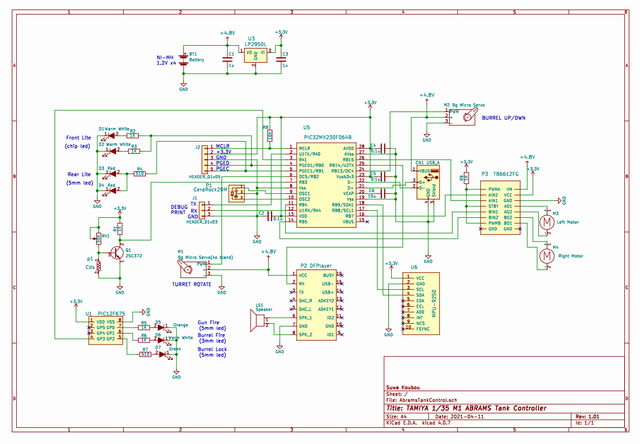
5.制御回路
ラジコンの無線送信機として、ELECOMのUSBワイヤレスの無線式ゲームコントローラを採用しました。このため制御用マイコンはUSBホスト機能の付いた物になります。
PATTON戦車のラジコン化で使ったPIC32MX230F064Bを今回も採用することにしましたが、ジャイロセンサー等の周辺機器が増えていてピンが足りません。
そこでピン数を補うために8ピンのPIC12F675をサブマイコンとして使うことにしました。
このエイブラムス戦車模型では、ラジコン化する前からCdsセンサーでLEDの点灯制御を行っていましたが、今回もその機能を残しています。周囲が暗くなるとフロントライトが自動で点灯します。
左右の走行用駆動モーターのドライバーには、シャーマン戦車のラジコン化で使ったTB6612FNGを使用しました。
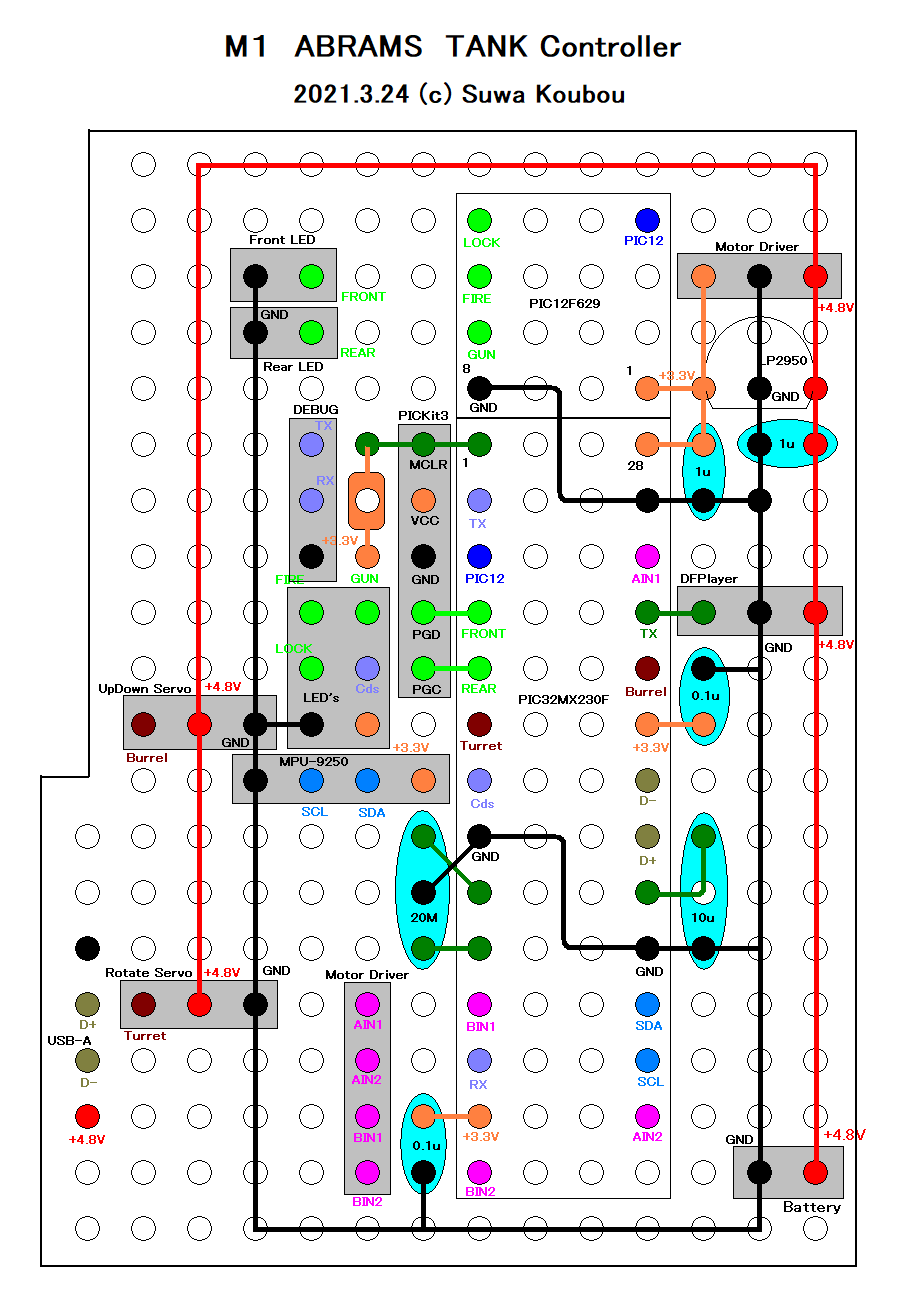
全体回路図とマイコン基板の部品配置図です。
 |
 |
サブマイコンのPIC12F675とは、1線によるシリアル通信で4chのオンオフ指令を送信出来るようにしました。その信号フォーマットは次のとおりです。
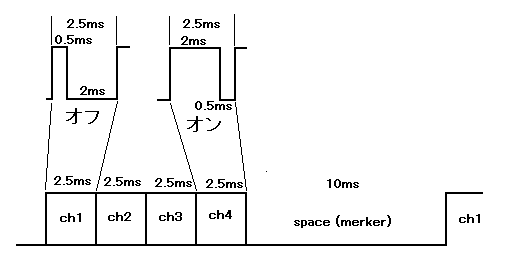
1chあたり2.5msのパルスを4ch分送信した後、10msのスペース信号を送信します。全体で20msの信号を繰り返し伝送しています。
出力オフの指令は、ハイレベルが0.5msec、ローレベルが2.0msecのパルスです。出力オンは、この逆でハイレベルが2.0msec、ローレベルが0.5msecのパルスとなります。
8ピンのPIC12Fは、この信号を受信し、ch1はGP2、ch2はGP1、ch3はGP0のビットをオンオフします。
今回はこのビットのオンオフで砲塔内のLEDの点灯制御を行っています。なお、ch4は予備で使っていません。
PICのファームウエアは、MPLAB IDE上で、32MXはC言語で、12Fはアセンブラで作成しました。
作成したソースコードは以下の通りです。(一部 Microchip のコードを含みます)
6.部品の実装と可動の様子
 |
 |
 |
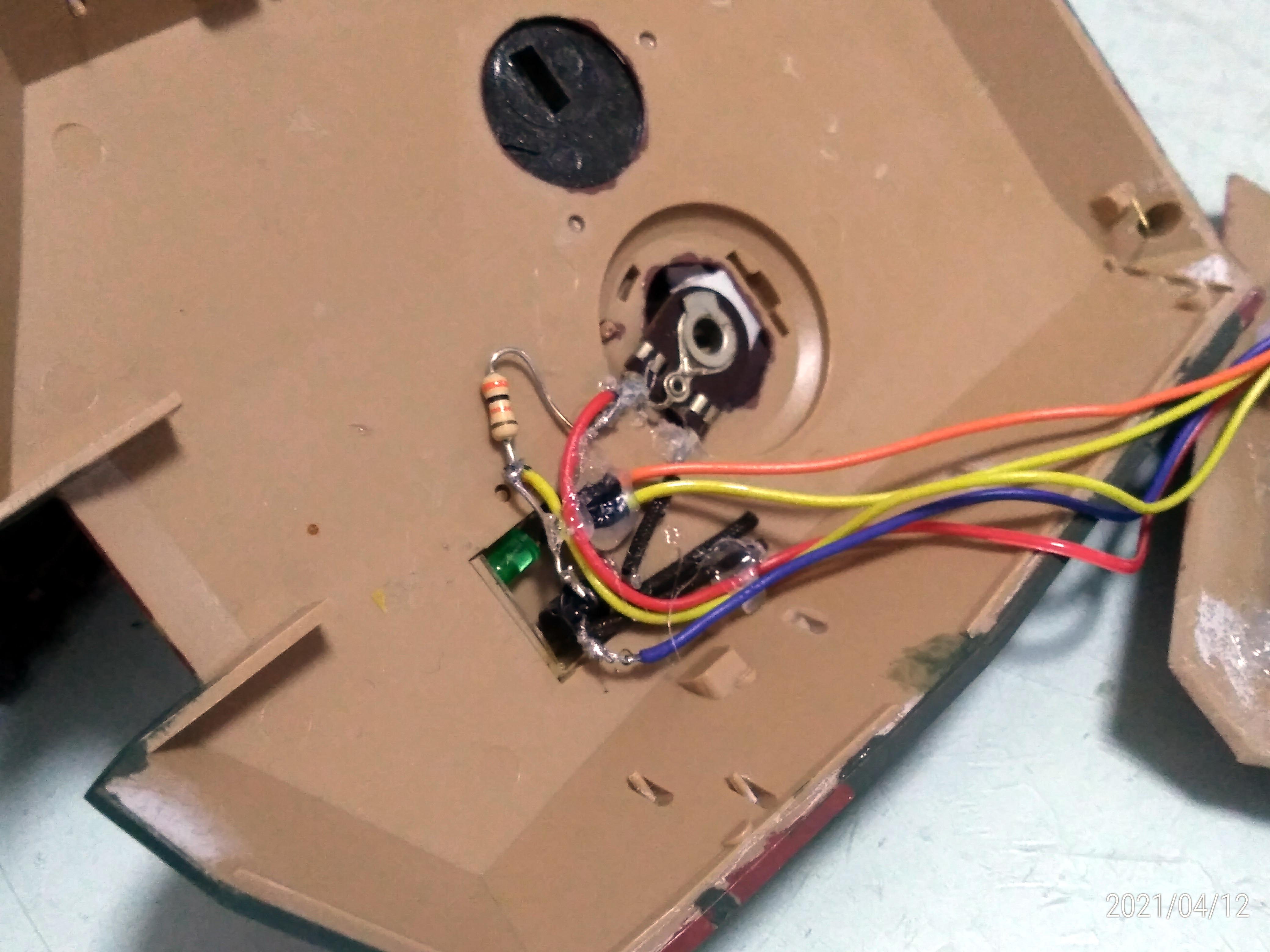 |
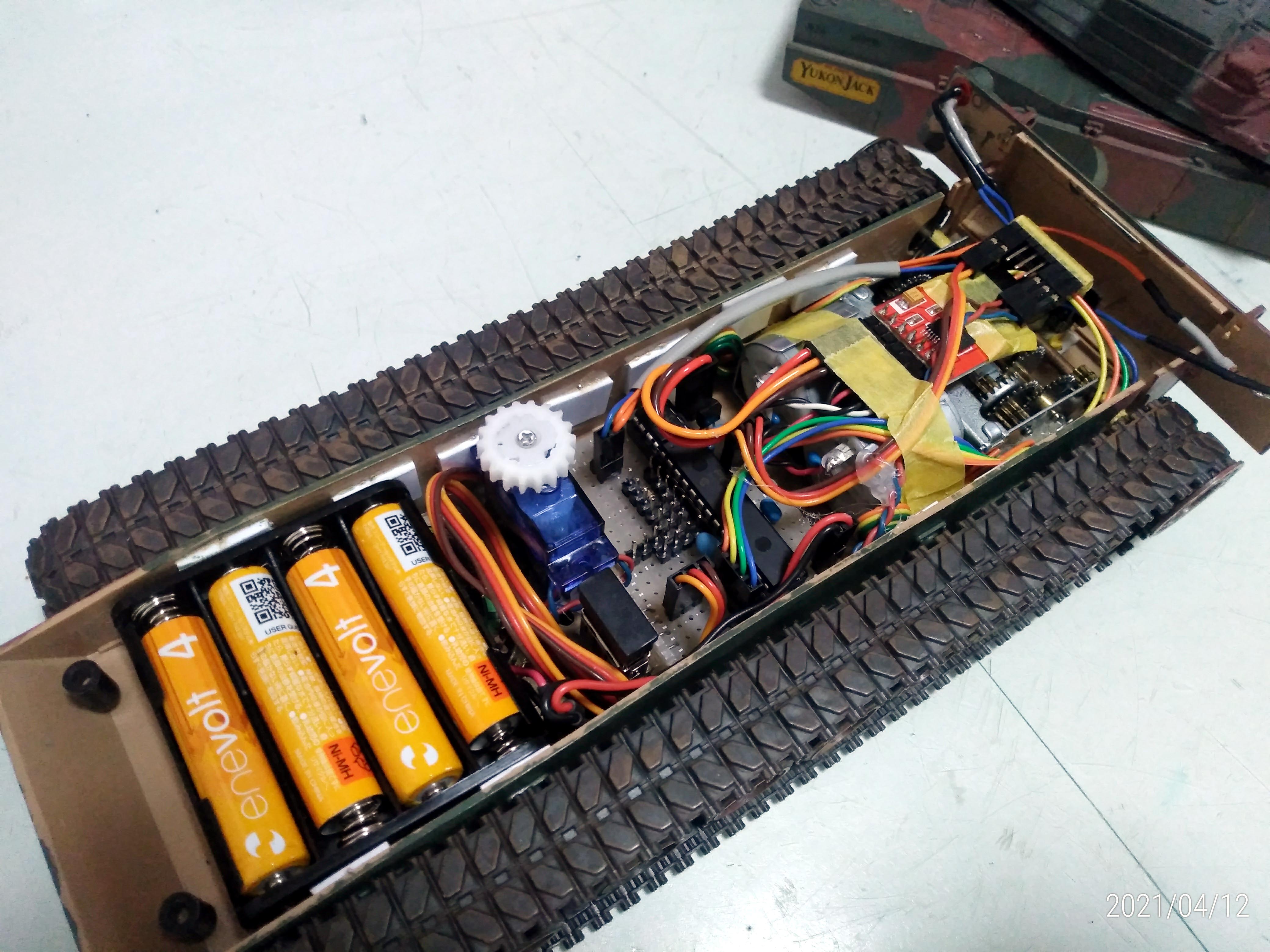
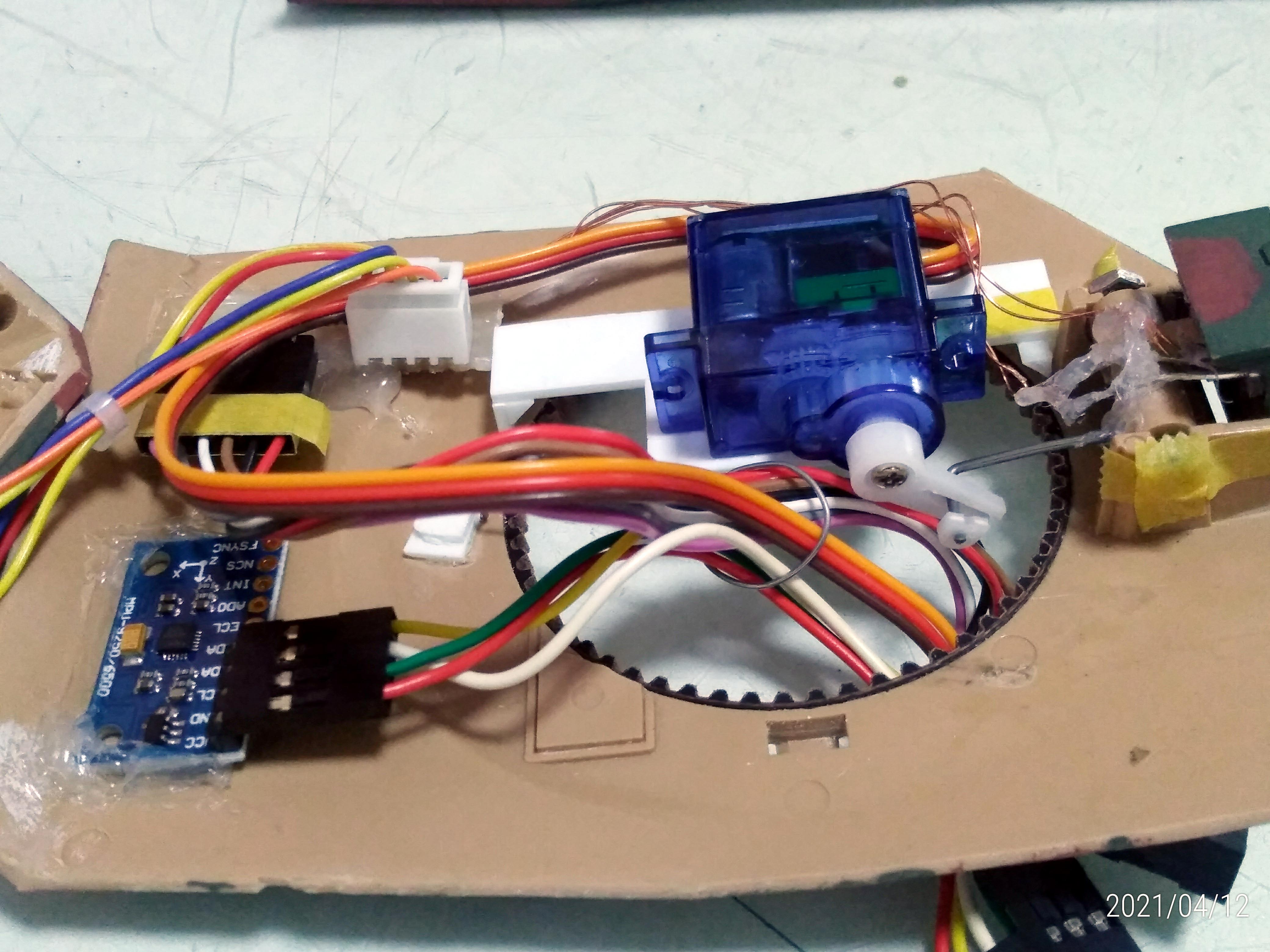
| 電池、サーボモーター、マイコン基板、ギヤボックス、モータドライバー、mp3プレーヤーを格納 | 砲塔下部にジャイロセンサー、サーボモータ、機銃LED | 砲塔上部にCdsセンサー回路、ロック表示LED |
この戦車模型は、車体内部や砲塔内部のスペースが大きいので部品は割と楽に収めることが出来ました。スピーカーは電池ボックスの下に隠れています。
砲塔回転用サーボモーターの隣にある黒い部品はゲームコントローラのUSBドングルです。
砲塔内のジャイロセンサー基板は「MPU-9250」です。加速度・ジャイロ・磁方位それぞれ3軸からなる9軸センサーですが、今回はジャイロのY軸とZ軸の2つのみ使っています。 Z軸で旋回角を、Y軸で前後の傾斜角を検出しています。
砲身ロックの機能ですが、停止状態で手で車体を動かした時はうまく機能しますが、モーターで旋回すると途中で動作不良を起こすことがあります。 モーターのノイズあるいは電源の揺らぎによりジャイロセンサーとの通信(I2C)に不都合が生じているものと思われますが詳しい原因追及は行っていません。
 |
 |
 |
| ライトの自動点灯・サウンド・機銃と主砲の発射 | 砲身ロックの動作確認 ロック前に砲身が上に一杯向いているので、最初に前傾した時、上向きの動作が出来ません |