| ふなっしーのロボットの製作 | 2014.7.5 |
はじめに
前回製作しました4足歩行ロボットは、そのデザイン(姿・形)が家族に受け入れられず、もう一つの評価でしたので、次の製作として、ゆるキャラの代表、「ふなっしー」のロボットを作ってみることにしました。
 |
1.デザイン
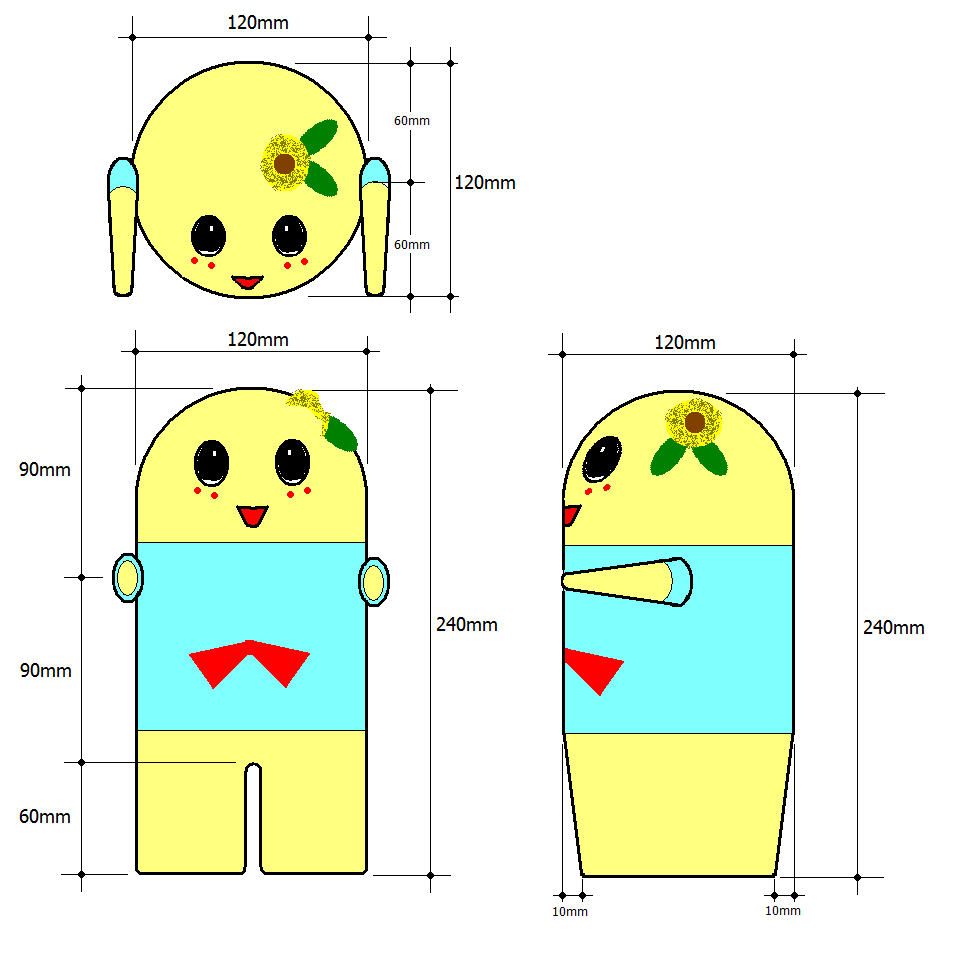
ふなっしーの姿・形から、製作するロボットのデザインは、右に示す概観図のように決めました。
身長と胴体巾の比率は、2:1とし、胴体の形状は、上から見て円形にしました。頭部、胴体、足の部分の高さ比率は、1.5:1.5:1 程度となるようにしてみました。
実際の大きさは、身長240mm、胴体巾120mmとしました。この大きさは、内部に組み込むサーボモーターや電池、回路基板の大きさから決定しました。
2.機構設計
ロボットの動きは、内部のメカ機構を簡単にするために、2足による前後歩行と、手の上げ下げ、ならびに手の開閉のみに限定しました。
歩行時の重心移動のために、胴体部分は、前後左右に少し揺れる(傾むける)ことができるような構造にします。
左右への移動は、右足、左足の歩幅を変えることで実現することとしその場での信地旋回などは考えません。
このままでは、歩くおもちゃ程度の動きしかできません。もう一工夫欲しいところです。そこで、ふなっしーの声でしゃべらせることにしました。
|
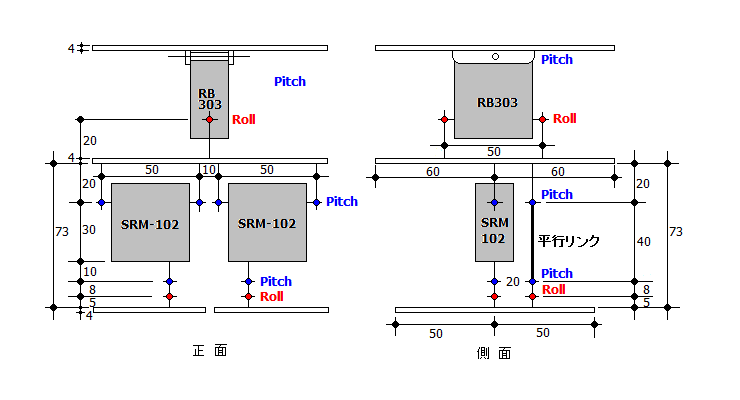
足首部分には、モーターは使いませんが、前後(ピッチ)、左右(ロール)に可動できるような構造にします。 サーボモーターを回転させて足を前後に動かした時、足となる板が、腰の部分の円形板と常に平行となるように、サーボモーターの後方または前方に平行リンクを設けます。 | ||
|
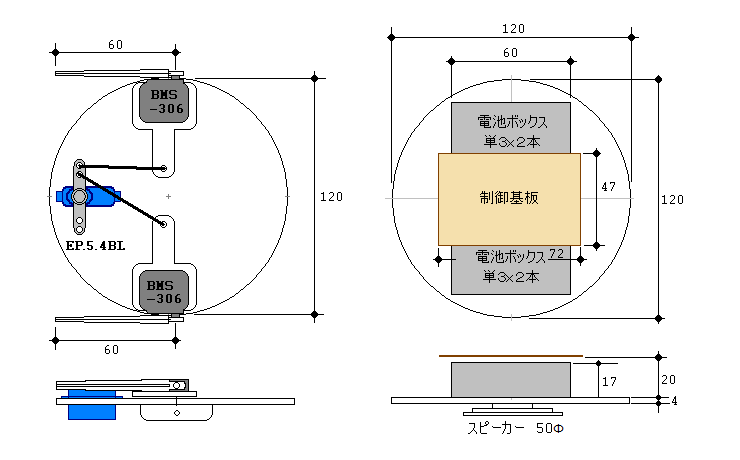
左右の手の開閉操作は、手のサーボモーターを取り付けた台を回転させることで実現します。取り付け台の回転のために、もう一つの小型サーボモーターを使うことにしました。 左右の手の上には、電池ボックスや制御基板、スピーカーを取り付けた円形板を積み重ねます。 |
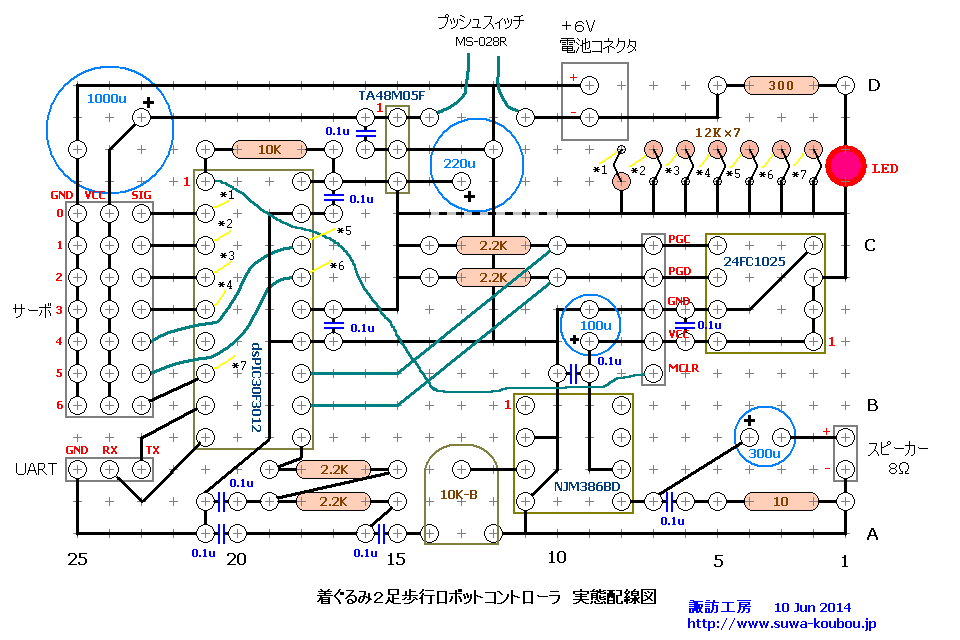
3.制御基板
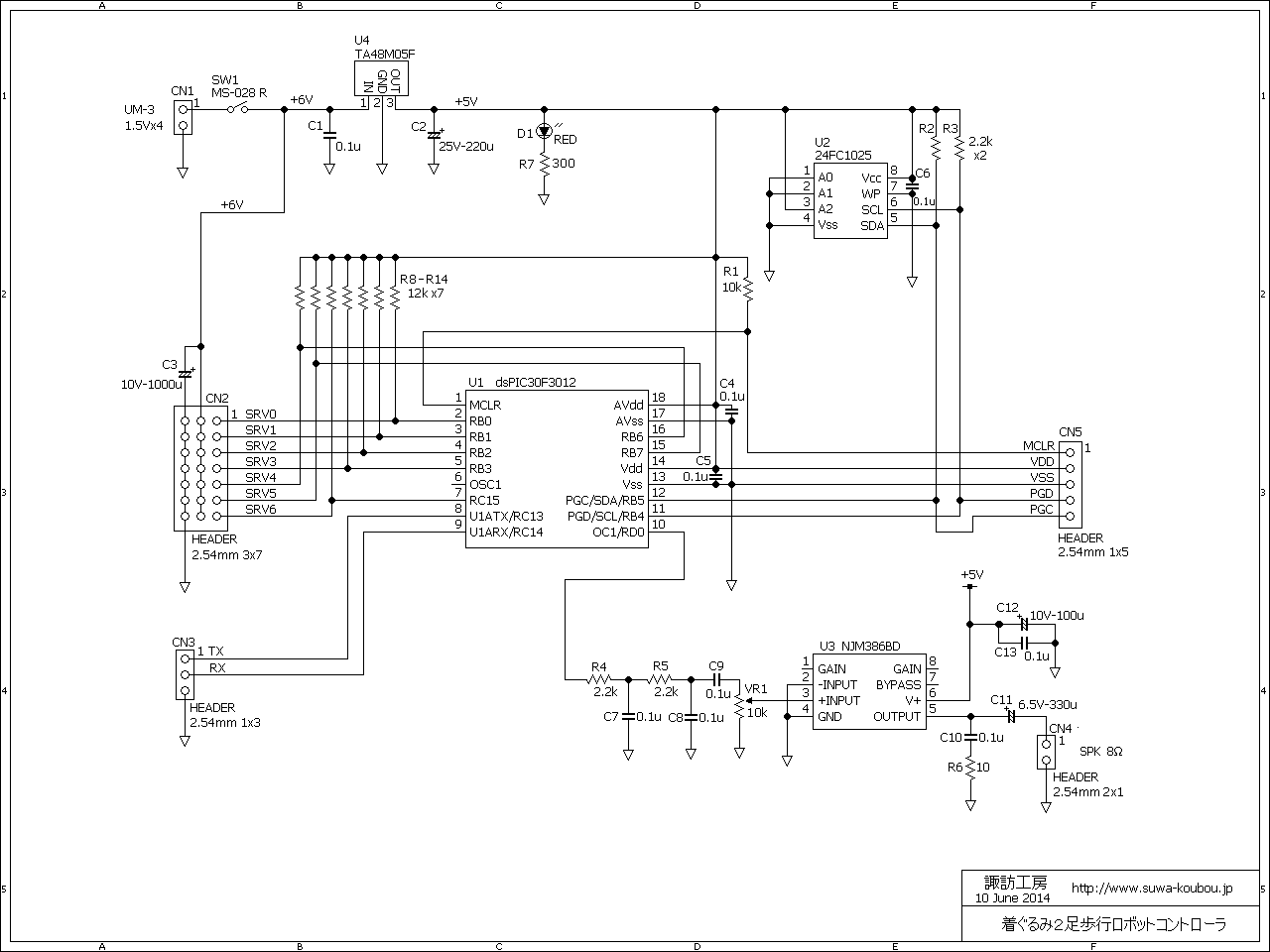
ロボットの制御には、PICマイコンを使いました。使ったマイコンは、dsPIC30F3012です。クロック約30MHzの16ビット、18ピンの小さなマイコンですが、24KBのROMと8KBのRAMが搭載されています。
サーボモーターのコントロールだけなら、このマイコン一個で済むのですが、おしゃべりをさせるために、2つのICチップを追加しています。一つは、音声データを格納しておくフラッシュROMです。1Mビット容量の24FC1025を使いました。PICマイコンとは、I2Cインタフェースで接続します。約16秒間の音声を格納しておくことができます。
もう一つは、オーディオアンプです。NJM386を使いました。このチップは、8Ωのスピーカーを駆動できます。
ふなっしーの音声は、CDから抽出しました。抽出した16ビット、ステレオ、44.1KHzの音声を、8ビット、モノラル、8KHzのu-Lawに変換し、フラッシュROMに格納しました。
PICに内蔵の出力比較モジュールを使ってPWM信号によるD/A変換を行い、フラッシュROMから読み取った音声信号を再生しています。
 |
 |
 |
| 製作の前に実態配線図を描いてみました。 |
4.製作
腰の部分や手を取り付ける円形板ならびに制御基板や電池ボックスを搭載する円形板(直径120mm)は、全てタミヤの1mm厚のプラ板から円形カッターを使って切り出しました。
1mm厚の円形板2枚を、2mmのプラ棒を挟んで接着し、4mm厚の円形板としています。サーボーモーターの軸受け部分などは、1.5mm厚のプラ板を使って作りました。
軸受けなどの回転部分には、真鍮製のハトメを使って強度を補強しています。
完成写真を次に示します。
 |
 |
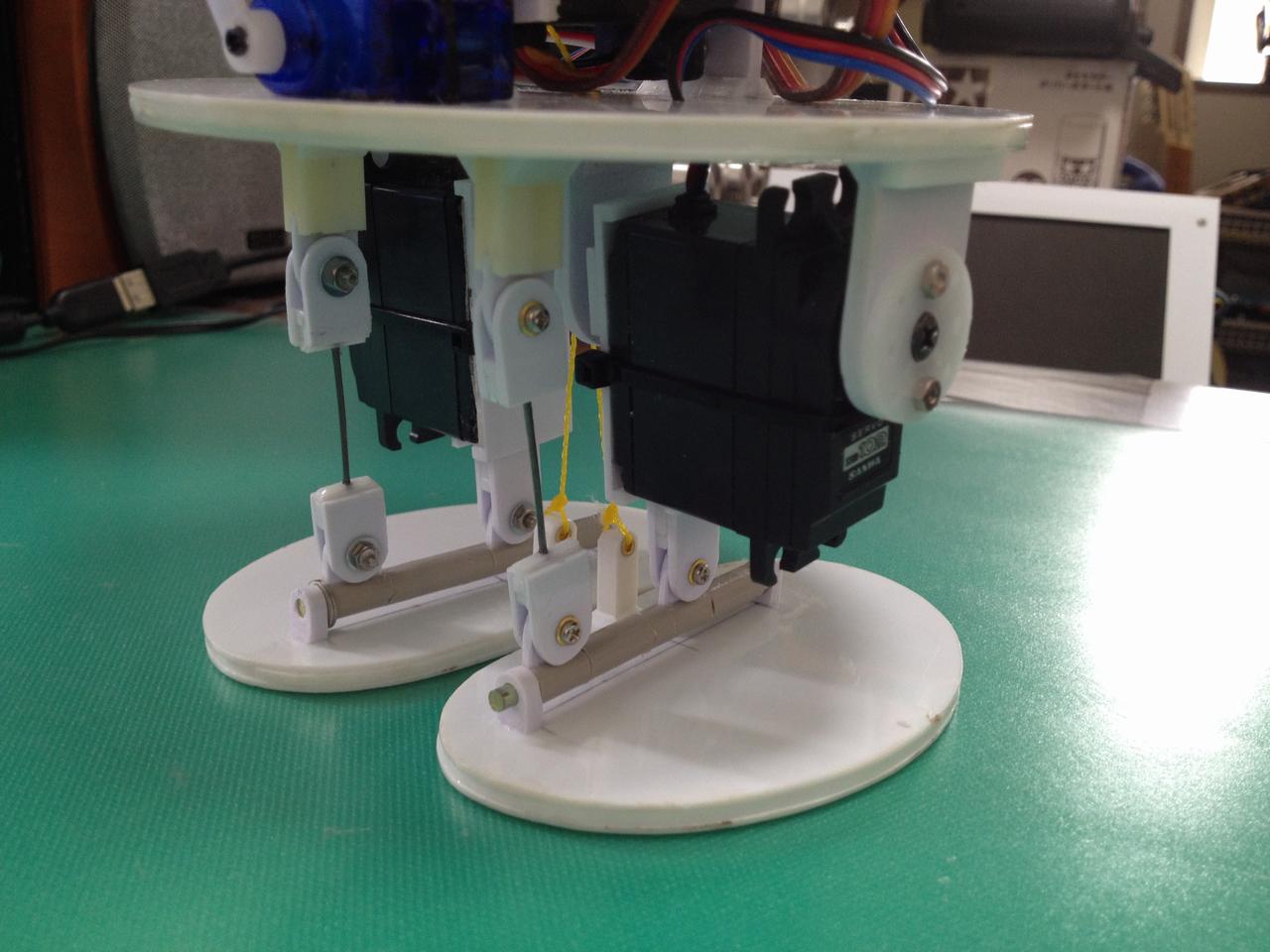 |
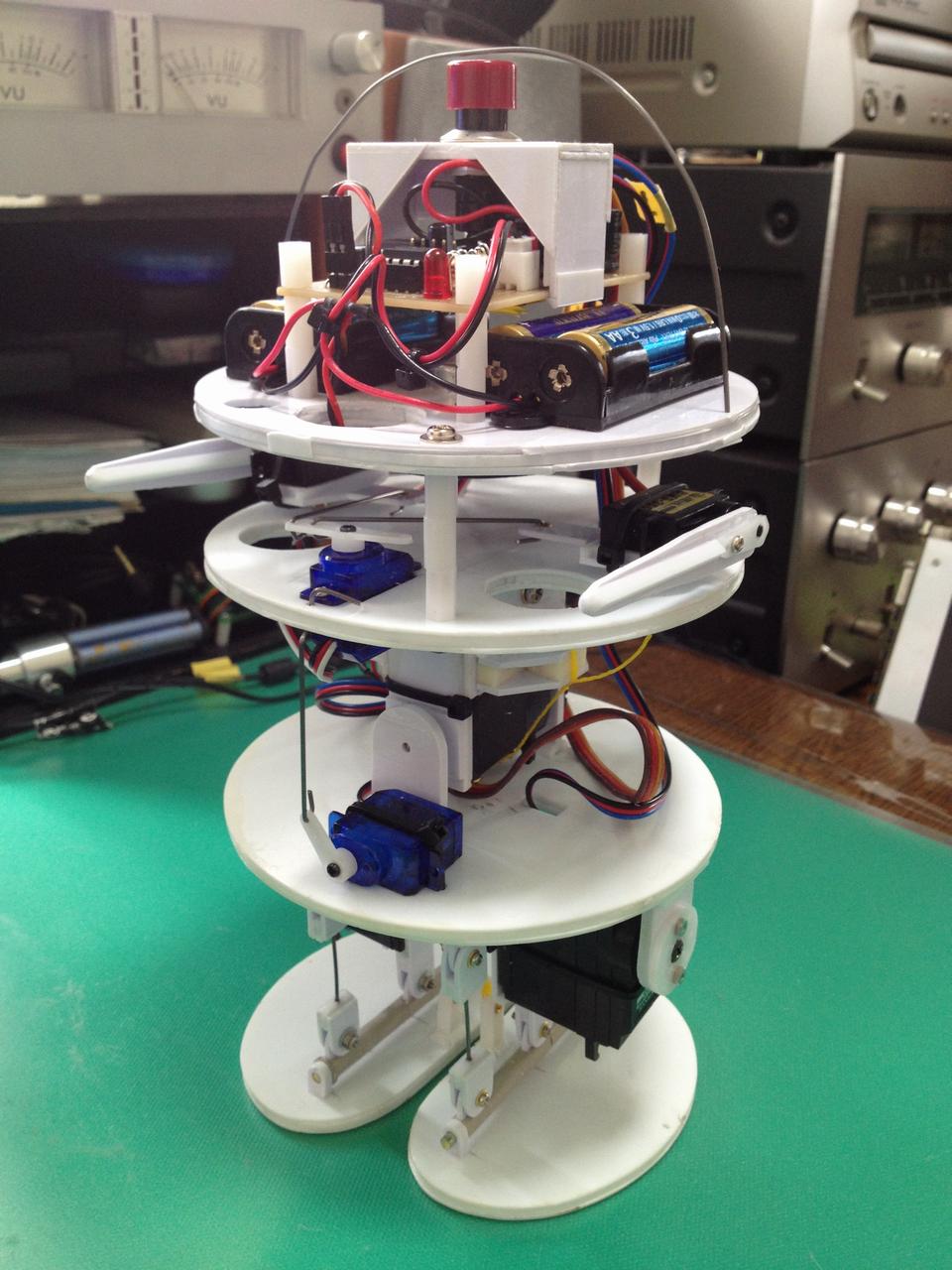
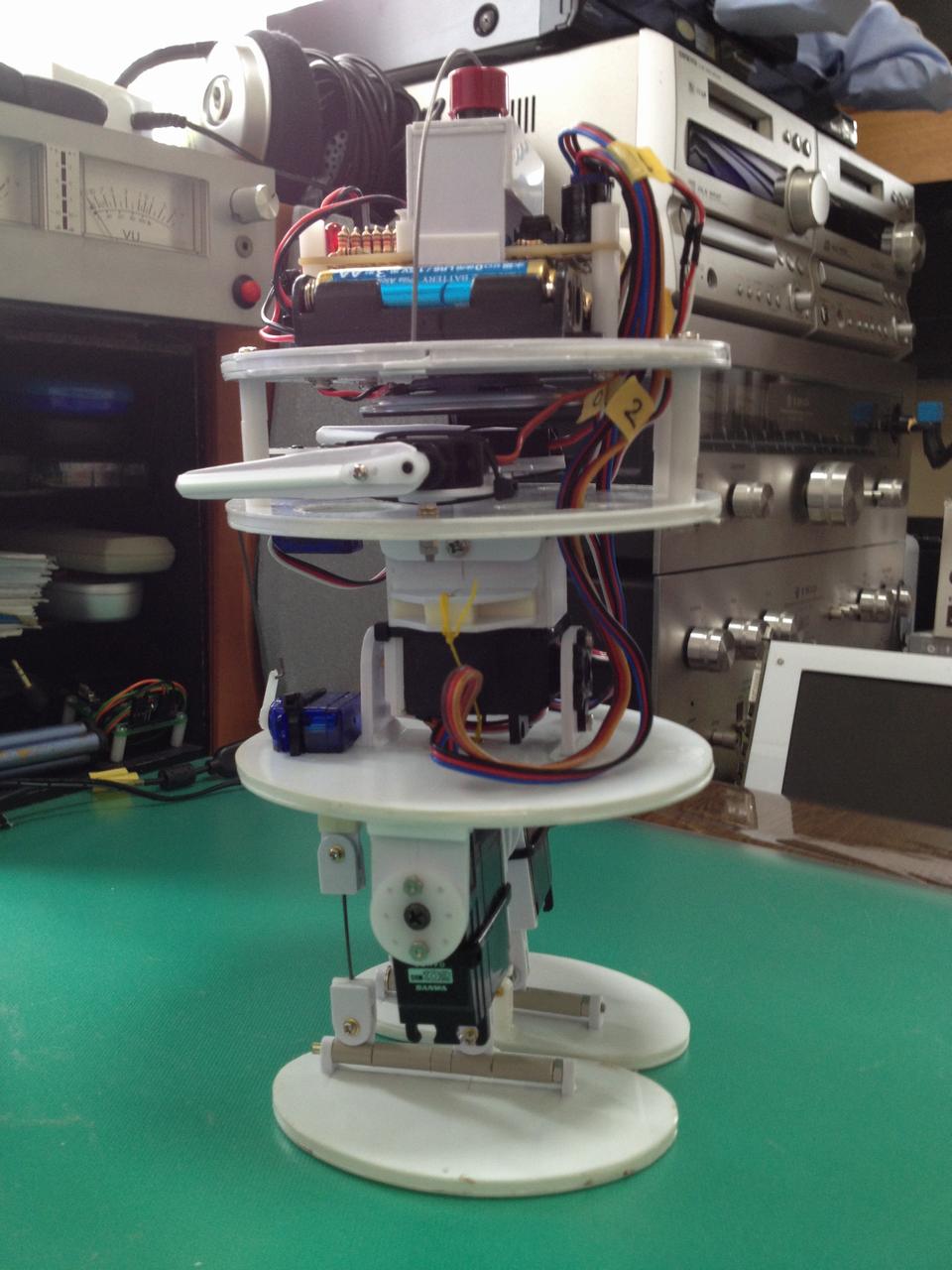
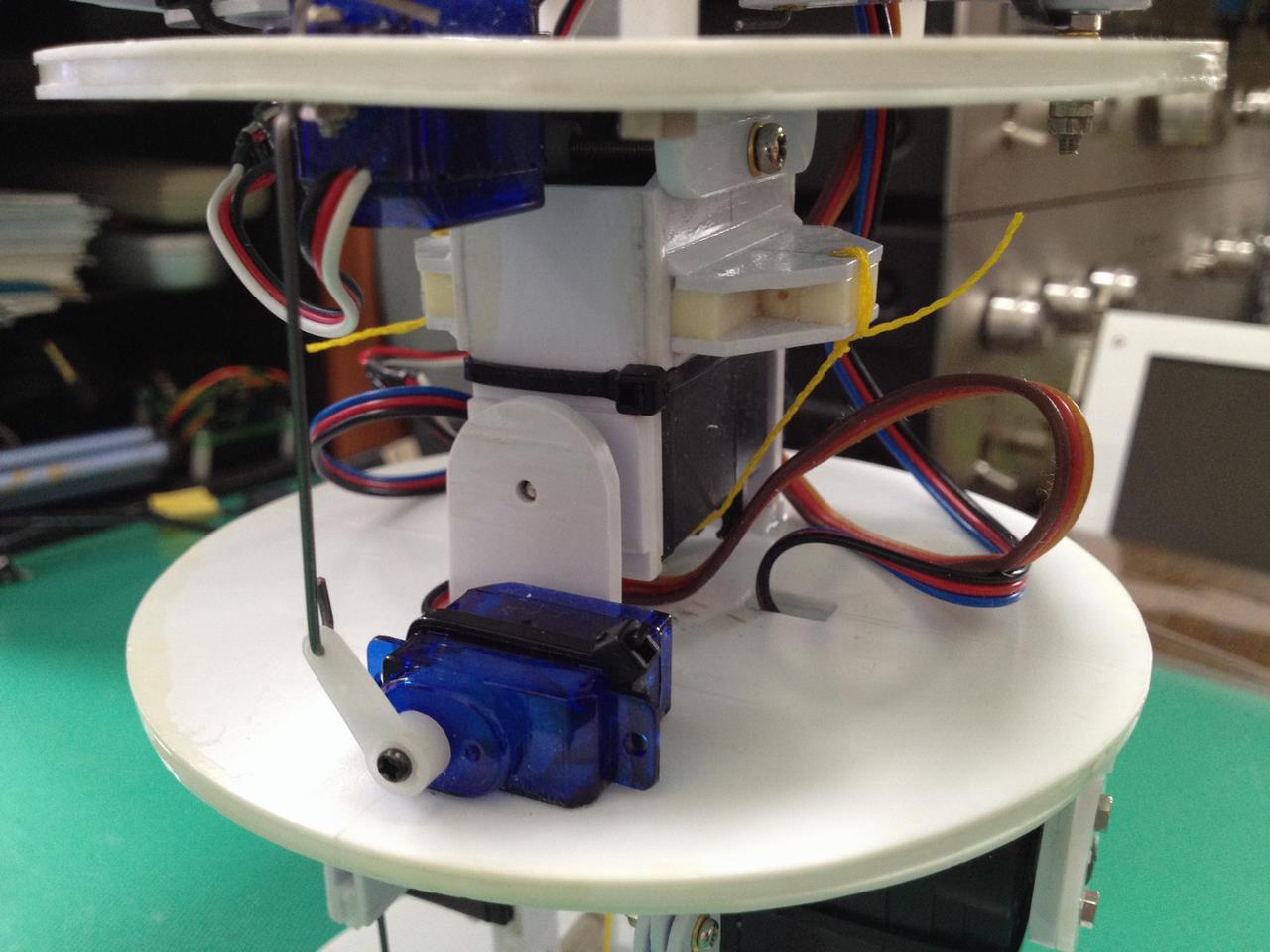
| 正面です。円形板を3枚積み重ねた構造になっています。 | 左側面です。真ん中のサーボモーターで胴体を左右に揺らせます。 | 足のモーターとリンク機構です。足裏となる部分を大きくして安定感を持たせています。 |
 |
 |
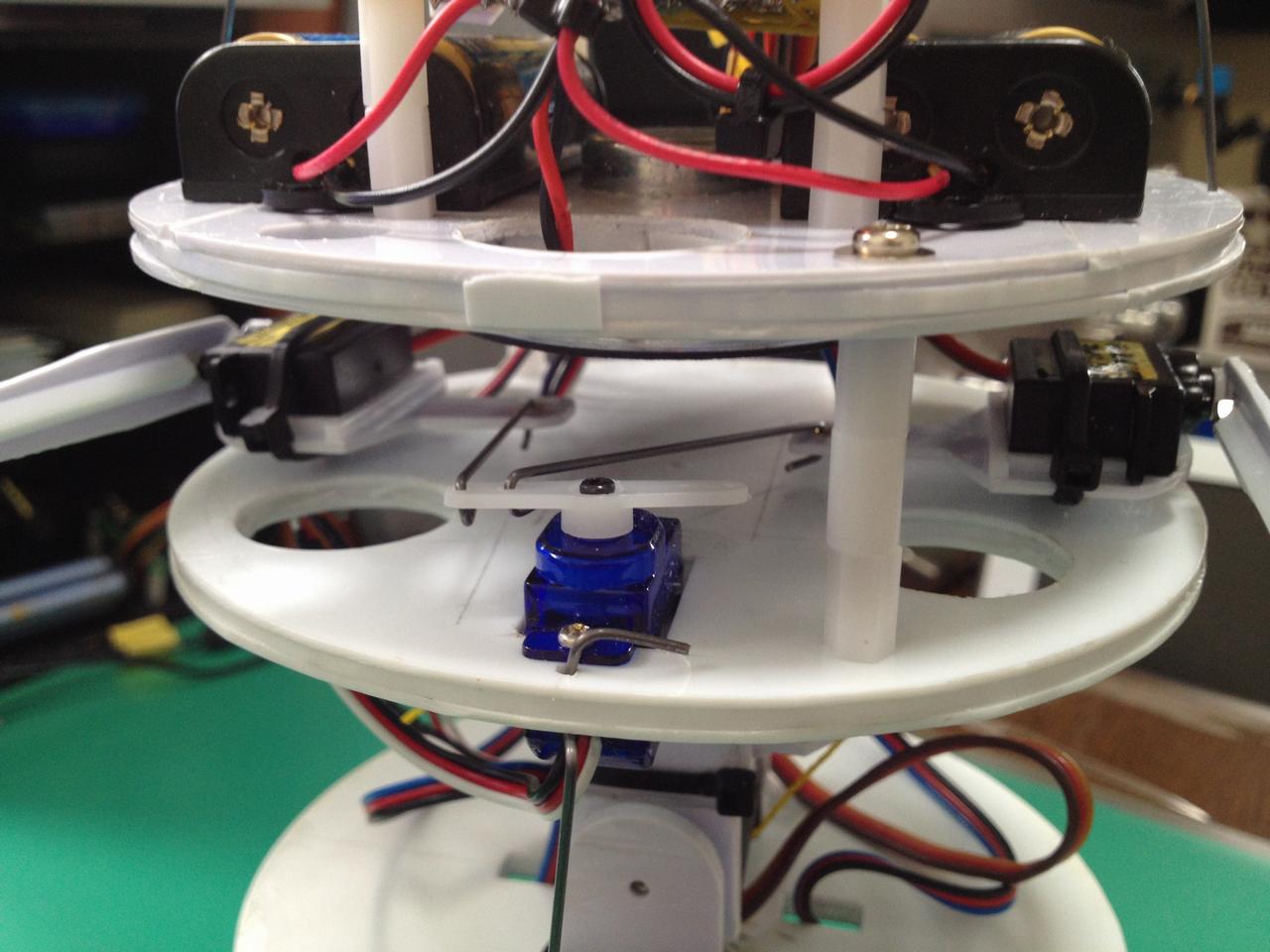 |
| 小型のサーボモーターとリンクを使って胴体部分を前に倒したり起こしたりします。 | 小型のサーボモーターで手(腕)を上下させています。 | リンクを使って左右の手を開閉させています。 |
 |
 |
 |
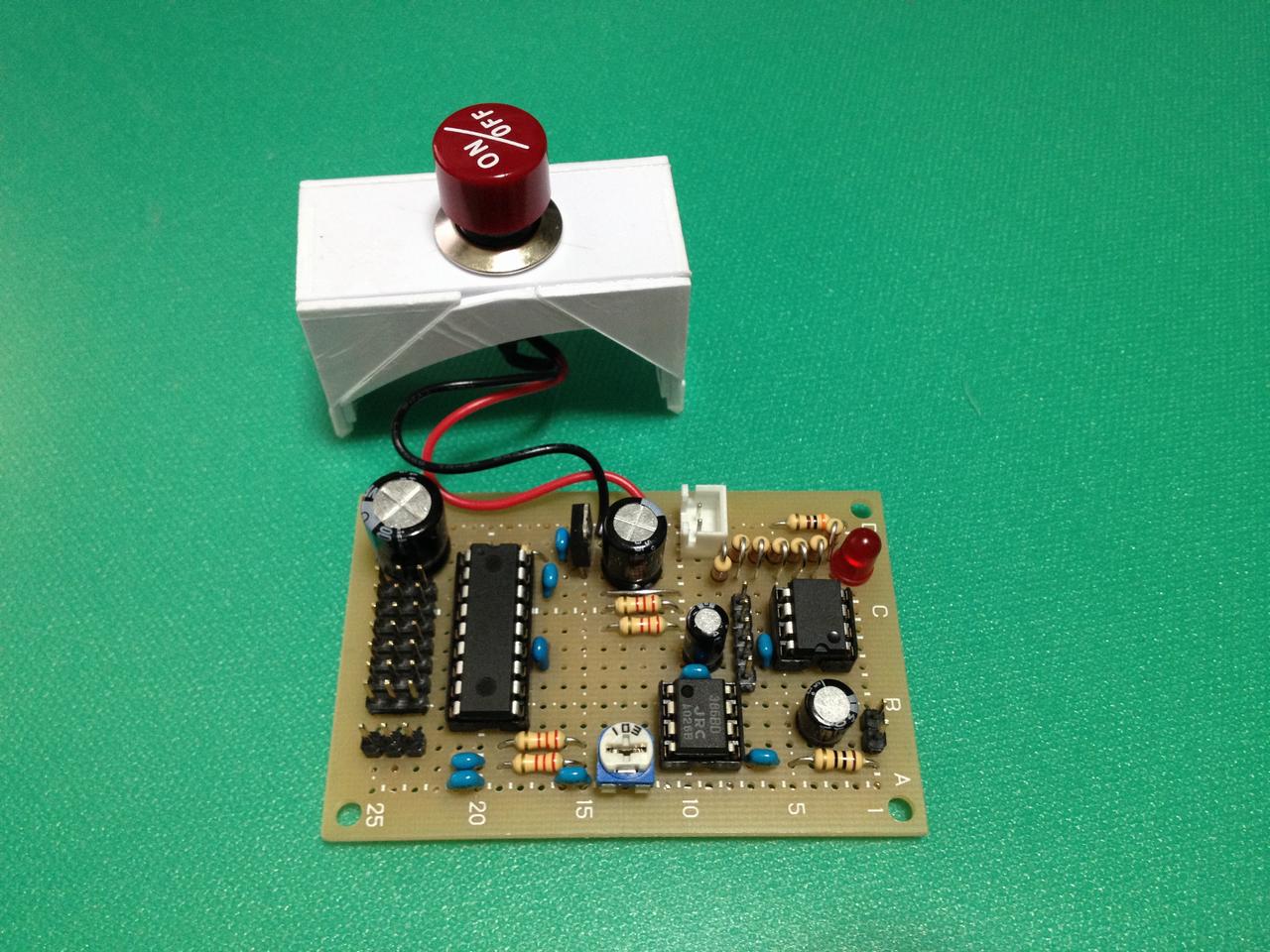
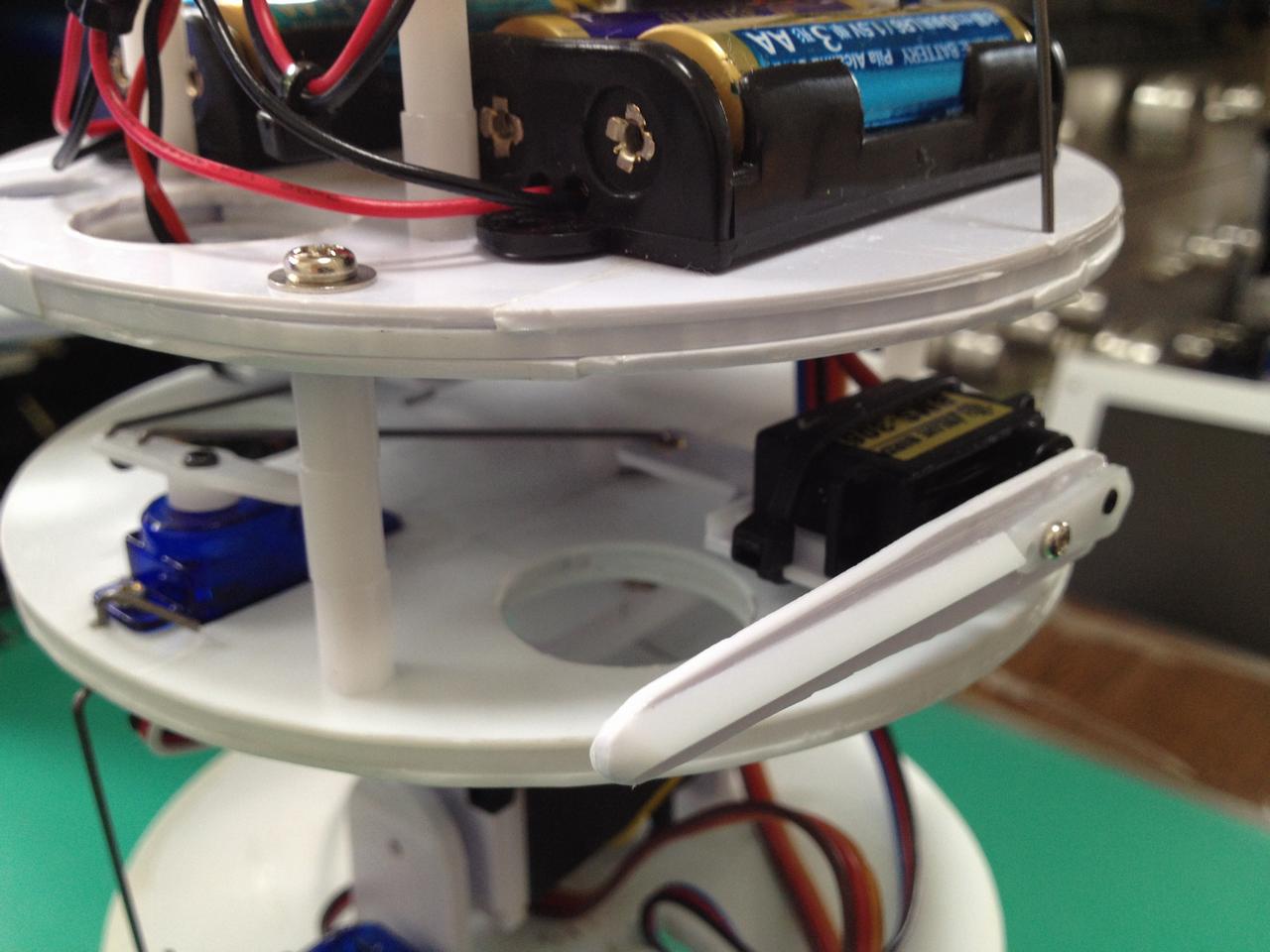
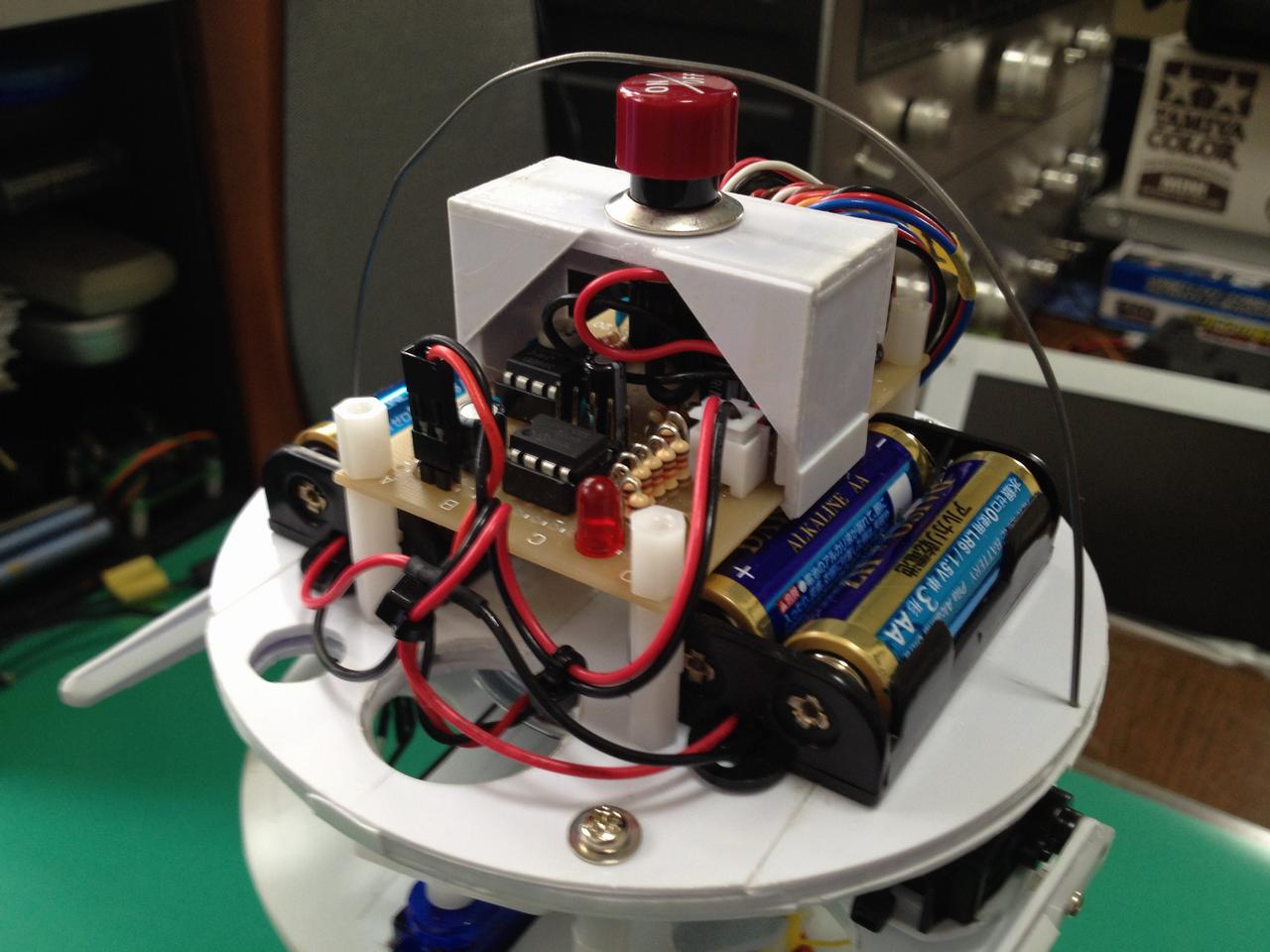
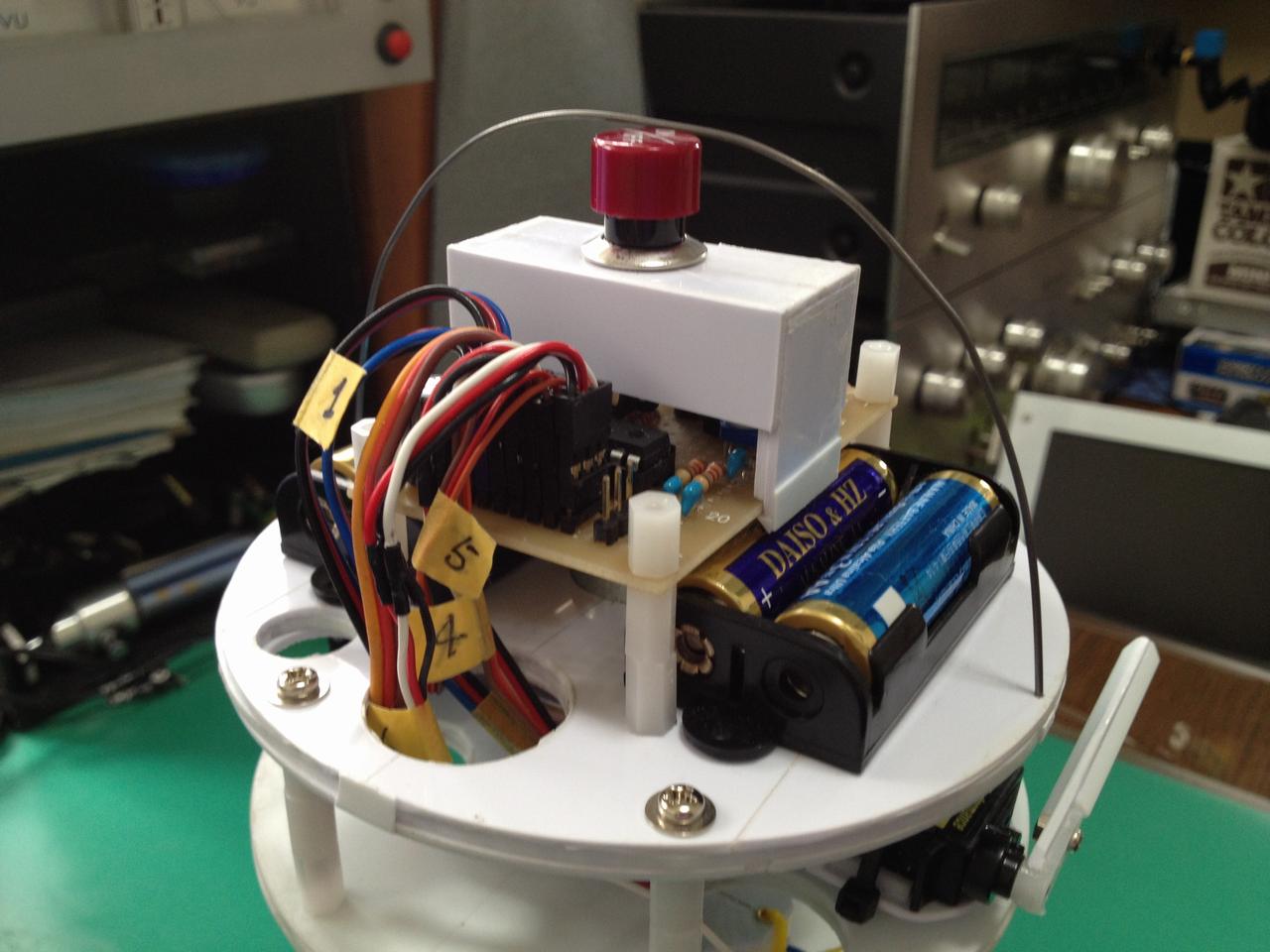
| PICマイコンを使った制御基板と電池です。この部分はふなっしーの頭の中に納まります。 電池とスピーカーの配線があります。 |
制御基板の後側です。サーボモーターへの配線が集まっています。 頭頂部にプッシュ型の電源スィッチがあります。 |
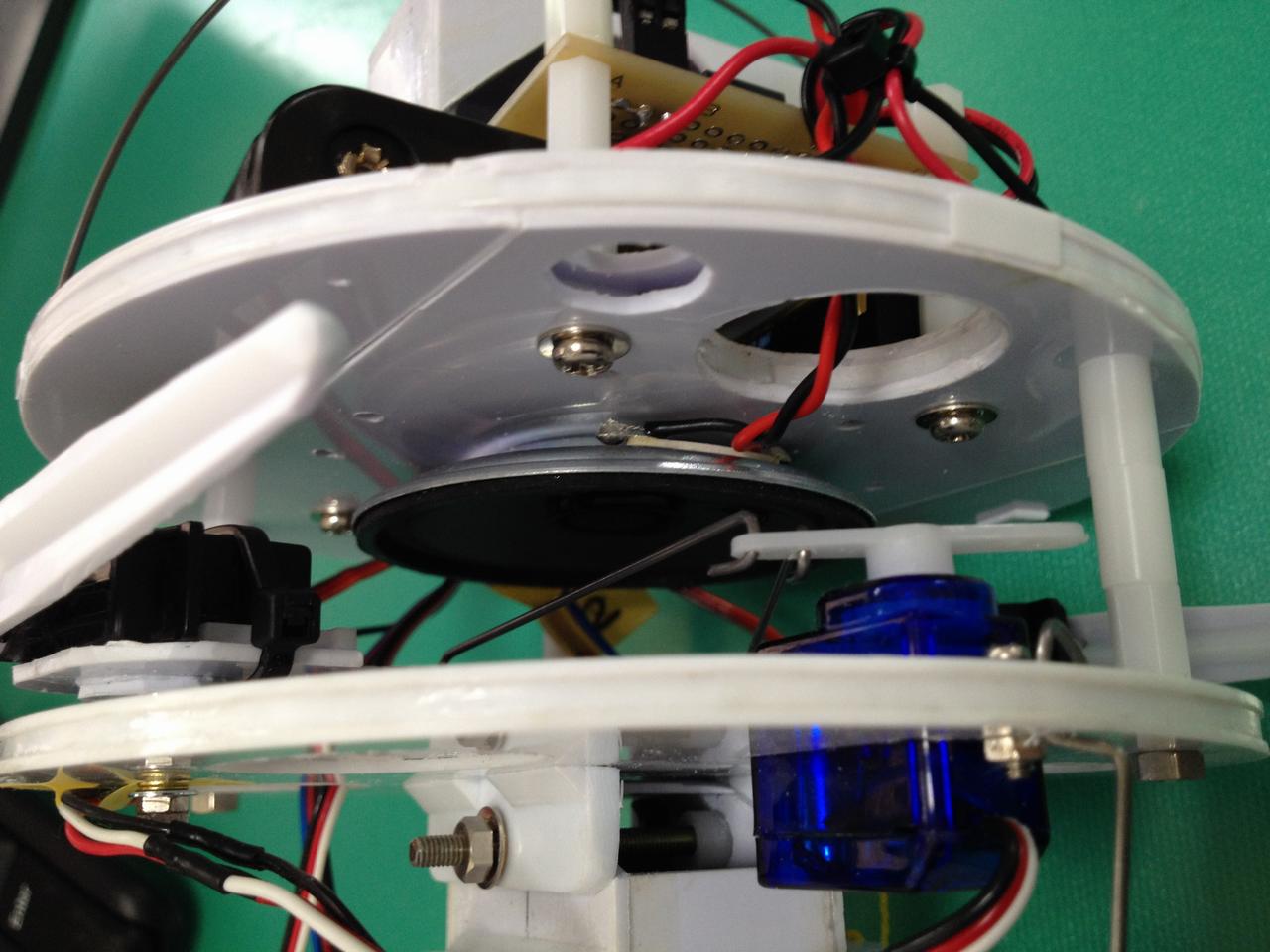
制御基板を搭載した円形板の裏側にスピーカーを取り付けています。 |
 |
 |
 |
| ふなっしーの着ぐるみの表側です。 | 裏側です。縫製がへたくそなものですからファスナーが結構目立ちます。 | 着ぐるみをロボット本体に被せて完成です。 |
5.ふなっしーのロボットが動いた
| 動きを調整中の時です。元気に動いて仰向けに転んでしまいます。転んでも動き続けています。 |
| こちらは、うつ向きに転びます。その後、転がしていじってみました。最後には机から落ちて動かなくなりました。 | 着ぐるみ無しで動かすと全然可愛くないです。不気味でもあります。 |